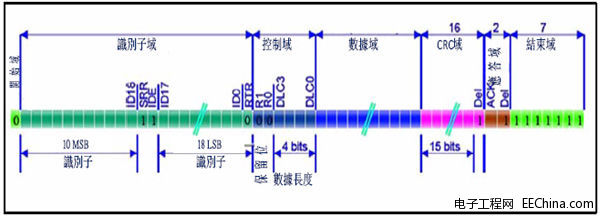
CAN Bus(Controller Area Network),控制器区域网,起源于80年代,由国际标准化组织(ISO)所发布,因为利用双线差动(two-wired differential),使其即使在电器条件恶劣环境下,也可正常运作的一种传输总线。又因双线沟通的特性,大幅缩减了其应用线路的使用量,也降低传统线路复杂易造成错误的发生机会。
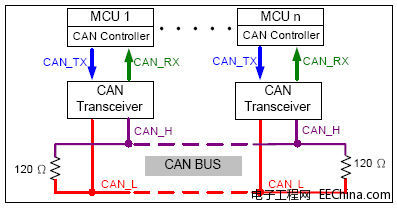
CAN Bus为利用一种双线的差动讯号传输规格,典型的CAN节点皆会由一个机械控制单元(Micro Controller Unit, MCU)来做控制,如图2所示,MCU中CAN Controller透过CAN_TX与CAN_RX传送/接收讯号至CAN Transceiver转换成差动讯号CAN_H与CAN_L。而终端电阻120欧姆能有效的吸收CAN网络上的反射波,有效地增强信号。
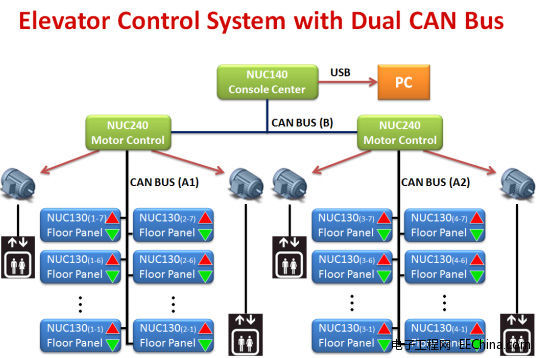
在实现电梯控制器和监测的设计模块应用,笔者选择的解决方案为台湾新唐科技的NUC240、NUC140与NUC130,新唐科技于2012年年底推出NUC200系列MCU,其中NUC240为NUC200系列中富含最多周边的产品系列,也是少数具有两组CAN信道的MCU厂商。使用者亦可透过Nu-LB-NUC240学习板搭配BSP链接库(Board Support Package)即可简易地对相关周边上手。