首页
|
新闻
|
新品
|
文库
|
方案
|
视频
|
下载
|
商城
|
开发板
|
数据中心
|
座谈新版
|
培训
|
工具
|
博客
|
论坛
|
百科
|
GEC
|
活动
|
主题月
|
电子展
注册
登录
论坛
博客
搜索
帮助
导航
默认风格
uchome
discuz6
GreenM
»
MCU 单片机技术
»
ARM
» 嵌入式系统应用中实现RS485的方向切换
返回列表
回复
发帖
发新话题
发布投票
发布悬赏
发布辩论
发布活动
发布视频
发布商品
嵌入式系统应用中实现RS485的方向切换
发短消息
加为好友
Bazinga
当前离线
UID
1023230
帖子
5213
精华
0
积分
2607
阅读权限
70
在线时间
158 小时
注册时间
2013-12-20
最后登录
2015-10-22
金牌会员
UID
1023230
1
#
打印
字体大小:
t
T
Bazinga
发表于 2014-12-30 18:54
|
只看该作者
嵌入式系统应用中实现RS485的方向切换
通信技术
,
嵌入式
,
工业
,
接口
,
接线
RS485接口具有良好的抗噪声干扰性能、长传输距离和多站能力等特点,使其成为工业控制的首选串行接口。嵌入式系统中也广泛采用RS485接口作为设备控制的串行接口。RS485采用两线差分的接线方式进行串口数据的传输。由于发送和接收都是采用这两根差分线进行,因此它是半双工工作模式。基于RS485的特点,分别讲述了通过硬件方式和软件方式来实现RS485发送和接收方向的切换,重点解决了DM8168嵌入式平台上软件实现RS485方向切换的功能。
RS485总线是工业应用中非常成熟的技术,是现代通信技术的工业标准之一。RS485总线用于多站互连十分方便,用一对双绞线即可实现,采用平衡发送和差分接收,即在发送端驱动器将TTL电平信号转换成差分信号输出,在接收端接收器将差分信号变成TTL电平,因此具有抗共模干扰的能力。根据RS485标准,传送数据速率达100 kb/s时通信距离可达1200 m.
RS485在嵌入式系统中的应用非常广泛。嵌入式系统可以通过RS485接口来控制终端设备。由于RS485是半双工模式,因此发送和接收的方向切换需要我们的关注和研究。如果方向切换方式选择不好可能会导致RS485驱动能力下降、软件执行效率下降,甚至导致系统异常等问题。
本文分别给出硬件实现RS485方向切换和软件实现RS485方向切换两种方式。两种方式各有优点,硬件方式控制起来比较简单。软件方式的驱动能力更好,但是和嵌入式平台关系比较密切,不同的平台都需要调试和验证。
1硬件方式控制RS485方向
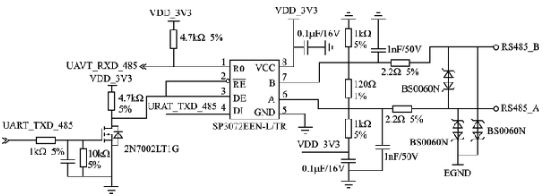
图1所示为硬件控制RS485的电路图。电路中使用2N7002LT1G MOS场效晶体管把UART_TXD_485这个MCU输出的RS485发送信号逻辑取反后送给RS485芯片的RE/DE PIN脚。控制的原理是,当UART_TXD_485输出低电平时RS485芯片的DE使能;输出高电平时RE使能。默认情况下UART_TXD_485是高电平,RS485芯片处于接收状态。发送数据时,UART_TXD_485上面有高低电平信号变化,低电平信号通过RS485芯片SP3072EENL/TR直接输出,高电平信号通过外部上下拉电阻来控制。
这种方法的优点是控制简单,软件不需要做额外的工作,控制RS485像控制RS232一样。但是这种方法的缺点是驱动能力可能不足,由于这种控制方法没有完全发挥出RS485驱动芯片自身的驱动能力,输出信号依赖于外部上下拉电阻,因此在复杂环境下,譬如很多负载需要控制时,就会存在驱动能力不足的问题。但是在一些简单的环境或者软件实现较复杂的平台下,使用这种方法还是切实可行的。
图1硬件控制RS485电路图
2软件方式控制RS485方向
2.1驱动能力分析
在复杂的RS485控制环境下,用上面介绍的硬件方式来控制RS485的方向会存在比较突出的驱动能力不足的问题。修改上述控制方法,将TTL这一侧的2线控制改为3线控制,就是将收发控制信号不用当前的/TXD来控制,而从主控分出一根GPIO线来控制收发。
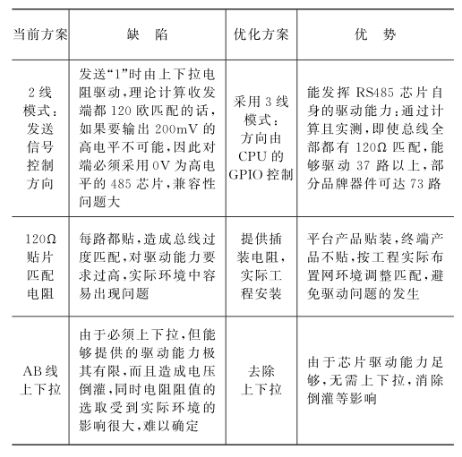
按照输出电流计算,3线控制方式相对用2线控制的总线上下拉作为输出的方式,其驱动能力提高了25~50倍(不同厂家不同型号有差异),如果辅以终端电阻灵活配置的措施,RS485的驱动能力将完全不是问题。表1是两种控制方式驱动能力的对比。
2.2软硬件环境
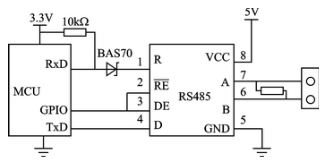
图2软件控制方法中的硬件设计
软件控制方法采用图2的硬件设计,图中很突出的修改是使用MCU的GPIO来控制RE和DE.RS485芯片的供电采用5 V供电,提高驱动能力。RS485芯片的RE和DE控制使用MCU的GPIO输出高低电平来控制。简单来说就是,在RS485进行数据传输时,通过GPIO来控制传输方向。这里采用的MCU是TI公司的DM8168处理器来实现软件的RS485切换功能。软件版本使用UBoot2010.06和linux2.6.37.用软件来实现RS485的收发,尽量要保证执行效率;要达到上面的目的就需要对串口驱动进行调试,使用串口驱动用到的软件资源和串口控制器本身的硬件资源来实现RS485的控制。
表1软件和硬件控制方式驱动能力的对比
2.3 UBoot代码修改
需要修改的文件:
①board/ti/ti8168/evm.c
②drivers/serial/ns16550.c
③include/configs/ti8168_evm.h
ti8168_evm.h文件中增加切换宏定义:
#define CONFIG_RS485_DIR_SW 1
evm.c文件中增加切换函数:
void rs485_dir_sw(int rs485_dir){
if(rs485_dir ==0)
_raw_writel(RS485_DIR_MASK, TI81XX_GPIO1_CLEARDATAOUT);
else
_raw_writel(RS485_DIR_MASK, TI81XX_GPIO1_SETDATAOUT);
}
s16550.c串口驱动文件中增加RS485方向控制:
void NS16550_putc(NS16550_t com_port, char c){
#ifdef CONFIG_RS485_DIR_SW
rs485_dir_sw(1);
#endif
……//此处代码省略
#ifdef CONFIG_RS485_DIR_SW
while((serial_in(UART_LSR_TEMT)== 0)
rs485_dir_sw(0);
#endif
}
其中UART_LSR_TEMT表示发送BUF和移位寄存器为空。默认情况下RS485是接收状态,一旦要发送数据,就把RS485切换为发送状态。发送完数据后,等待发送BUF和移位寄存器为空,然后切换回接收状态,这里无需使用timeout。
2.4 Linux代码修改
需要修改的文件:
①arch/arm/machomap2/bordti8168evm.c
②drivers/serial/omapserial.c
③include/linux/serial_core.h
serial_core.h文件,uart_port结构体中增加set_rs485_direction函数指针,用于执行RS485的方向切换void(*set_rs485_direction)(int rs485_dir);原本考虑在uart_ops结构体中增加的,但是这个结构体是常量类型,对它不作改动,因此加到了uart_port结构体中。在该文件中添加相关宏定义和函数指针类型用于函数注册:
#define SET_RS485_RX0
#define SET_RS485_TX1
typedef void(*set_rs485_direction_t)(int rs485_dir);//用于函数注册
omapserial.c文件主要做了如下几点改动:
①添加omap_rs485_dir_fun全局的函数指针。
static set_rs485_direction_t omap_rs485_dir_fun[OMAP_MAX_HSUART_PORTS]={NULL, NULL, NULL, NULL, NULL, NULL}
②外部驱动利用omap_rs485_dir_fun_reg注册函数对omap_rs485_dir_fun进行赋值。
void omap_rs485_dir_fun_reg(int port_num, set_rs485_direction_t rs485_dir_fun){
if(port_num>=OMAP_MAX_HSUART_PORTS)
printk(KERN_ERR“%s, port_num error max is %d, but %d \\n”, __FUNCTION__, OMAP_MAX_HSUART_PORTS-1, port_num);
omap_rs485_dir_fun[port_num]= rs485_dir_fun;
}
EXPORT_SYMBOL(omap_rs485_dir_fun_reg);
③serial_omap_probe函数中对控制程序中用到的up->port.set_rs485_direction进行赋值。
up->port.set_rs485_direction= omap_rs485_dir_fun[pdev->id];
④默认情况下RS485处于接收状态。
⑤serial_omap_enable_ier_thri函数中把RS485切换为发送状态。
static incline void serial_omap_enable_ier_thri(struct uart_omap_port *up){
if(!(up->ier UART_IER_THRI)){
/* rs485 dir change to tx */
if(up->port.set_rs485_direction != NULL)
up->port.set_rs485_direction(SET_RS485_TX);
……//此处代码省略
}
}
⑥serial_omap_stop_tx函数中把RS485切换为接收状态。
static void serial_omap_stop_tx(struct uart_omap_port *port){
……//此处代码省略
if(up->ier UART_IER_THRI){
up->ier ~UART_IER_THRI;
serial_out(up, UART_IER, up->ier);
/* rs485 dir change to rx */
if(port->set_rs485_direction != NULL)
port->set_rs485_direction(SET_RS485_RX);
}
}
⑦transmit_chars更改一下,原先的代码是当没有更多的字符要发送(环形缓冲为空)时需要关闭发送中断,这时串口控制器发送BUF和移位寄存器中还是有数据的,这些数据串口控制器自动发送完成后才算结束,由于已经关闭了发送中断,因此发送结束后就没有中断产生了。但是RS485切换方向需要等到完全发送完成后才能进行。因此对transmit_chars函数做了修改。调用serial_omap_stop_tx函数前判断发送BUF和移位寄存器是否为空,如果为空就可以切换方向了。简而言之,延后了发送中断的关闭时间。
static void transmit_chars(struct uart_omap_port *up){
……//此处代码省略
if(uart_circ_empty(xmit)|| uart_tx_stopped({
if(up->port.ops->tx_empty(
return;//added for last transmit
serial_omap_stop_tx(
return;
}
……//此处代码省略
if(uart_circ_empty(xmit)){
if(up->port.ops->tx_empty(
return;//added for last transmit
serial_omap_stop_tx(
}
}
⑧arch/arm/machomap2/boardti8168evm.c文件在ti8168_evm_init函数中调用omap_rs485_dir_fun_reg函数注册RS485切换函数。
2.5实验结果分析
上述软件修改有如下几个优点:不增加硬件开销;不增加和使用任何硬件资源;不增加软件开销;不影响软件执行效率;硬件控制是电信号控制,方向切换和TX绑定;软件控制是整个发送缓冲区完成发送后再进行方向切换,控制实现上更加合理。
对软件切换RS485做了基本的测试,情况如下:
①控制台操作。整个启动打印信息正常。UBoot和Kernel下控制效果和硬件控制一样,可以很流畅地进行命令的输入和回显,串口终端增加输入字符间的延时后可以进行配置的粘贴。内核在115 200和38 400下分别进行测试OK.
②内核下加大负责进行大数据量的发送。增加负载,开多个ping包进程(产生大量中断)、Nand Flash的操作、CPU占有率接近100%条件下,通过RS485输出大量数据,没有乱码,校验OK.
③极高的实时性。
由于本文给出的软件实现方式是基于Linux内核实现的,因此很好地保证了方向控制的实时性。实际结果显示,DM8168数据发送完成到产生方向控制信号之间的时间在25μs左右,几乎可以忽略不计。而有些设计在用户空间使用应用程序进行方向切换的方法会导致20 ms以上的延时,导致了一系列异常问题的产生。
结语
本文详细描述了RS485方向控制的硬件和软件两种实现方式。两种控制方式各有特点,硬件控制方式实现简单,不需要软件干预,对软件而言RS485串口收发就像RS232一样简单。软件控制方式可以极大地提高整个RS485线路的驱动能力,本文给出的基于Linux内核的控制方法又很好地保证了RS485方向切换的实时性,满足了实用性要求。这两种方式在很多场合已经得到了很好的应用和验证。特别是软件实现方式,可以扩展到更多的应用场合,譬如复杂的多主、多从的RS485使用环境,软件控制可以根据自己的需求来实现整个RS485线路不同的数据流向,可以规避某个设备对RS485链路上异常信号的干扰,给实际应用带来了很多的便利性。
收藏
分享
评分
the king of nerds
回复
引用
订阅
TOP
返回列表
PowerPC
测试测量
职场驿站
消费电子
资料共享
工业控制
综合技术交流
LED技术
嵌入式技术
电商论坛
Pine A64
资料下载
方案分享
FAQ
行业应用
消费电子
便携式设备
医疗电子
汽车电子
工业控制
热门技术
智能可穿戴
3D打印
智能家居
综合设计
示波器技术
存储器
电子制造
计算机和外设
软件开发
分立器件
传感器技术
无源元件
资料共享
PCB综合技术
综合技术交流
EDA
MCU 单片机技术
ST MCU
Freescale MCU
NXP MCU
新唐 MCU
MIPS
X86
ARM
PowerPC
DSP技术
嵌入式技术
FPGA/CPLD可编程逻辑
模拟电路
数字电路
富士通半导体FRAM 铁电存储器“免费样片”使用心得
电源与功率管理
LED技术
测试测量
通信技术
3G
无线技术
微波在线
综合交流区
职场驿站
活动专区
在线座谈交流区
紧缺人才培训课程交流区
意见和建议