首页
|
新闻
|
新品
|
文库
|
方案
|
视频
|
下载
|
商城
|
开发板
|
数据中心
|
座谈新版
|
培训
|
工具
|
博客
|
论坛
|
百科
|
GEC
|
活动
|
主题月
|
电子展
注册
登录
论坛
博客
搜索
帮助
导航
默认风格
uchome
discuz6
GreenM
»
通信技术
» LPC2365的μC/OS-II 下多串口通信编程
返回列表
回复
发帖
发新话题
发布投票
发布悬赏
发布辩论
发布活动
发布视频
发布商品
LPC2365的μC/OS-II 下多串口通信编程
发短消息
加为好友
forsuccess
当前离线
UID
871057
帖子
6281
精华
0
积分
3141
阅读权限
90
在线时间
282 小时
注册时间
2012-2-21
最后登录
2015-6-23
论坛元老
UID
871057
性别
男
1
#
打印
字体大小:
t
T
forsuccess
发表于 2013-7-22 19:50
|
只看该作者
LPC2365的μC/OS-II 下多串口通信编程
蓄电池
,
无线电
,
加速度
,
波特率
,
接收机
国产某掠海恒高硬体拖靶在拖曳飞行时,需要将自身的各种参数通过无线链路实时上传至拖曳母机,同时实时接收拖曳母机的遥控指令完成相应的动作。拖靶自身的参数包括:开关高控状态、蓄电池电压、无线电高度表值、飞行高度装定值、垂向加速度值、舵翼角、温度值、普通性能GPS接收机输出的主要参数值、高性能测量GPS接收机输出的主要参数值等。其中,前面7项由一块采集板完成采集并装配成帧数据,通过RS232串口以9 600 bps的波特率、1 Hz的速率输出。
数据帧长度固定为12字节,同时接收6字节/帧的遥控指令数据。普通性能GPS接收机以9 600 bps的波特率、1 Hz的速率输出$GPGGA和$GPRMC两条语句,其字节数可变,但最多不超过1 60字节;高性能GPS则以57 600 bps的波特率、20 Hz的速率输出RT、RD、TO、SI、RC、CP、DC、FC、PV 9个参数,这些总的参数数据量随所观测到的卫星数目而变化,但最多不超过305字节。
现在需要将采集板和普通性能GPS接收机的数据组成每帧75字节数据(如果收到遥控指令时,则需要一次返回3帧同样数据)、以每秒一帧的速率上传至拖曳母机以供实时显示。将高性能测量GPS接收机输出的数据直接上传至拖曳母机存储以供事后处理。由此可见这是一个典型的多串口较大数据量的通信应用问题。
1 工作原理
利用具有多个串口资源的ARM7处理器LPC2365芯片分别实时接收数据采集板和普通性能GPS接收机发送过来的数据,并按要求进行组帧后,通过互斥型信号量存入FIFO类型的发送数据队列中;将接收到的高性能GPS接收机数据也存入同一发送数据队列中;当发送数据队列不为空时,通过一个二值信号量启动串口发送任务进行数据的发送,直到一帧数据发送完毕为止。发送数据流向示意图如图1所示。
应用程序是基于嵌入式实时操作系统μC/OS-II编写完成的,针对不同的功能创建不同的任务,包括串口接收任务、串口发送任务、组帧任务等。
2 硬件设计
主控CPU选用NXP公司生产的ARM7处理器LPC2365,该芯片拥有256 KB的Flash存储器、32 KB的SRAM、4个全双工UART串口以及多达70个通用I/O端口,硬件资源非常丰富。4个全双丁串口可分别与数据采集板、普通性能GPS接收机、高性能GPS接收机以及数传模块进行通信;256 KB的Flash存储器和32 KB的SRAM可以存储和运行嵌入式实时操作系统μC/OS-II下的应用程序。
由于高性能GPS接收机以57 600 bps的波特率、20Hz的速率和305字节/帧的数据量输出数据,其数据量占空比高达85%,考虑到还需要下传其他参数信息,因此应选用波特率更高的数传模块完成数据传输任务。
美国GE MDS公司生产的EL806数传模块拥有先进的调频扩频技术,在902~928 MHz频段上提供了速率最高可达115 200 bps(连续工作)的工业级的无线通信设备;在无线数据通信的可靠性、完整性和纠错能力方面具有较强优势;同时,该产品具有供电范围较宽、功耗较低、功率可达1 W、环境适应性较强的工业级性能。硬件系统框图如图2所示。
3 软件设计
3.1 μC/OS-II的移植
μC/OS-II是一个完整的、可移植、可固化、可裁剪、源代码公开的占先式实时多任务内核,它可移植到多种不同架构的微处理器上,包括8位、16位、32位单片机或DSP,以及64位的微处理器。
要在自己的硬件环境中运行该操作系统,首先必须将其移植到相应CPU体系结构中,好在国内已有大量的书籍和文章介绍移植方法,严格按照其步骤进行源代码编写和修改就可以得到一份自己移植的操作系统。更简捷、可靠的办法是从网站下载针对某一具体架构处理器的移植好的例程,大大方便了用户的使用。关于移植μC/OS-II到ARM7的方法可参考文献。
3.2 应用程序编写
要使用μC/OS-II嵌入式实时操作系统,编写应用程序必须遵守其编程规范。在本应用程序中,主要编写了串口中断服务程序和串口数据的收发任务,在任务间进行数据交换时,使用了互斥型信号量和二值信号量。
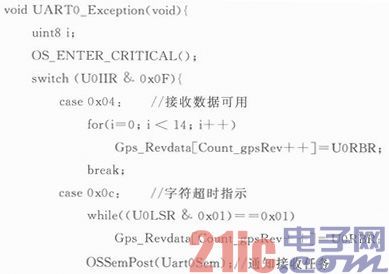
对于串口中断服务程序的编写,需要注意的问题主要在于通信帧数据是否为固定长度。在本应用程序中,串口1接收和发送的数据帧长度固定且较短,其中断服务程序和任务编程相对较简单;串口0和2接收到的数据帧是不定长的且长度较长,需要考虑数据帧长度是否为触发深度的整数倍。设置串口接收中断触发深度为14,当通信帧的长度不是14的整数倍时,对方将通信帧全部发送完毕后,最后一批数据必定不足14字节,从而导致超时中断,就可以在超时中断中发送信号量来通知接收任务,成功地结束接收过程。
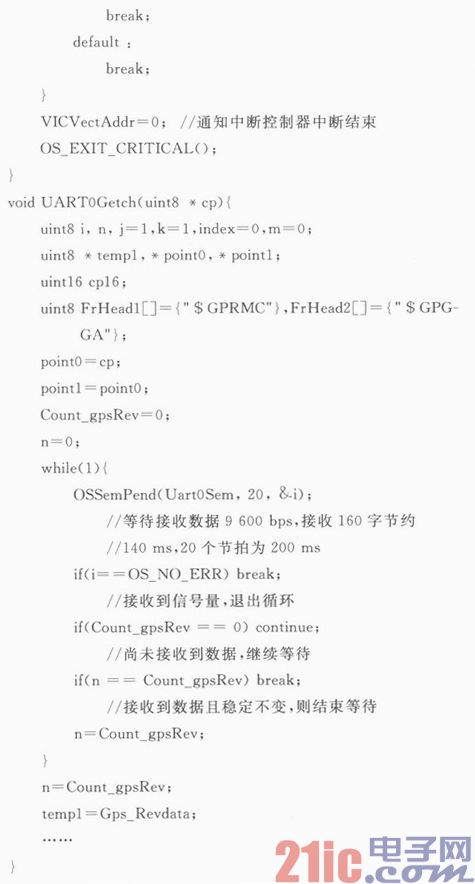
当通信帧的长度正好为14的整数倍时,对方将通信帧全部发送完毕后,最后一批数据必定是14字节,只能触发正常的接收中断,不会触发超时中断。在通信帧数据不定长的情况下,不能通过正常的接收中断来判断接收过程是否结束。为此,在通信任务中应为等待信号量函数设置超时参数,当接收到的数据稳定不变时就可以结束接收过程。串口0中断服务程序和接收数据任务程序片段代码如下:
依据所要完成的任务并结合硬件系统框图,将串口0和串口1接收到的数据存放在一个全局数组中,分别创建串口0和串口1接收任务,两个接收任务将接收到的数据直接写入全局数组的相应元素中。由于要求将串口0和串口1接收到的数据组帧以每秒一帧的速率发送出去,而串口0正好是每秒接收到一帧数据,或者说与串口0相连接的普通性能GPS接收机每秒发送一帧数据,所以发送帧数据的组装和写入队列任务的启动可以由串口0接收任务中的信号量来控制,这样可以避免因计时误差而导致下传的GPS帧数据跳变或重复。
由于需要将串口2接收到的高性能GPS接收机数据和串口0及串口1接收到的数据组帧后写入发送数据队列,所以涉及到发送数据队列资源的使用问题,也就是共享资源的使用问题。互斥信号量具有处理优先级反转的功能,特别适合对共享资源的互斥访问,其优先级继承值必须高于所有需要访问这个共享资源的任务的优先级。这里,串口2接收任务的优先级为9,数据组帧任务的优先级为13,所以设置互斥信号量的优先级继承值为8。当这两个任务向数据队列中写入数据时,首先需要获取互斥型信号量,待写完数据后应及时释放信号量,以供其他任务使用该资源。
在主函数main()中,创建了串口3接收数据任务,该任务的功能是创建其他任务,并在无限循环中等待串口3接收数据,当串口3接收到数据后对其进行判断,并依据其内容执行相应的指令。其任务优先级设为最高基于以下两点:该任务是关键任务,当接收到指令时必须执行,不得遗漏;该任务执行的不是很频繁,可以保障低任务优先级的任务得到执行。其程序代码如下:
数据组帧任务的主要功能是每秒将有关参数组装成一帧数据写入串口3,发送缓存数据队列(75字节),如果收到一条指令则将当前帧重复3次写入串口3发送缓存数据队列(225字节),其程序如下:
对于串口3发送任务相对较简单,需要注意一点的是在等待发送结束信号量后,一定要将数据缓存信号量清零,代码如下:
结语
实际应用表明,具有多达4个串口的ARM7处理器LPC2365芯片应用在多串口通信的工程实践中可以减化硬件设计,在实时操作系统μC/ OS-II下,采用上述关键技术编写多串口通信应用程序可以使系统工作可靠,运行稳定,满足实时性要求。
收藏
分享
评分
回复
引用
订阅
TOP
返回列表
电商论坛
Pine A64
资料下载
方案分享
FAQ
行业应用
消费电子
便携式设备
医疗电子
汽车电子
工业控制
热门技术
智能可穿戴
3D打印
智能家居
综合设计
示波器技术
存储器
电子制造
计算机和外设
软件开发
分立器件
传感器技术
无源元件
资料共享
PCB综合技术
综合技术交流
EDA
MCU 单片机技术
ST MCU
Freescale MCU
NXP MCU
新唐 MCU
MIPS
X86
ARM
PowerPC
DSP技术
嵌入式技术
FPGA/CPLD可编程逻辑
模拟电路
数字电路
富士通半导体FRAM 铁电存储器“免费样片”使用心得
电源与功率管理
LED技术
测试测量
通信技术
3G
无线技术
微波在线
综合交流区
职场驿站
活动专区
在线座谈交流区
紧缺人才培训课程交流区
意见和建议








 数据组帧任务的主要功能是每秒将有关参数组装成一帧数据写入串口3,发送缓存数据队列(75字节),如果收到一条指令则将当前帧重复3次写入串口3发送缓存数据队列(225字节),其程序如下:
数据组帧任务的主要功能是每秒将有关参数组装成一帧数据写入串口3,发送缓存数据队列(75字节),如果收到一条指令则将当前帧重复3次写入串口3发送缓存数据队列(225字节),其程序如下:

