|
 
- UID
- 864567
|
加入模糊算法之后的模糊PID控制系统结构图如图4所示。

现场温度为控制对象,用户设定的温度值为控制系统给定值,AD采集模块获取的温度值为控制系统反馈值,反馈值及给定值经过系统的模糊PID控制算法运算之后去控制现场加热设备的状态,从而控制温度对象。
本系统模糊PID控制算法根据系统运行的不同状态及工程经验,结合PID系统中Kp,Kd,Ki三者系数的关联性,设计模糊整定参数。系统使用偏差值Error和Error_Change作为模糊判定的输入,语言取{NB,NS,O,PS,PB},根据Error和Error_Change整定Kp,Ki,Kd的模糊值,同样取{NB,NS,O,PS,PB}5个模糊值。然后建立模糊规则表,表1为Kd规则表,Ki,Kp模糊规则表与Kp规则表类似。

不同的控制系统对PID的3个系数Kp,Ki,Kd的模糊也不同,本系统希望控制对象温度值能尽快恢复到稳态,所以Kd系数的模糊尤为重要,设置的Kd对Error_Change特别敏感。
以下是本系统的模糊PID控制算法软件实现代码:
typedef struct
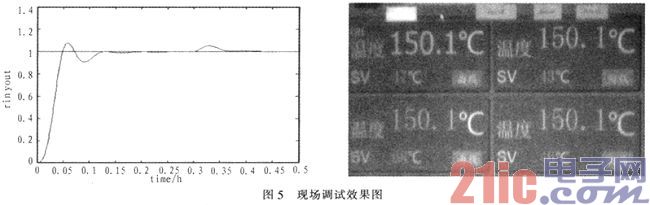
由左边图可以看出控制过程前期略有超调,但是对于系统是可接受的,因为生产线刚开始的时候需要预热炉子。控制过程中测试人员加入一次扰动,可以看出系统不会因为扰动产生震荡,而之前使用经典PID测试的时候受到扰动后会产生震荡。因此模糊PID控制算法可以解决防弹衣生产线上大炉温度因季节或环境变化导致控制效果不理想的问题。
由右边图可看出本智能温度控制系统的对大炉温度对象的控制精度可以达到±0.1度。
3 系统运行结果分析
本智能温度控制系统在浙江某个防弹衣生产线上运行,现场调试结果的数据经过MATLAB运算得到的系统控制效果图及现场触摸液晶主控屏的系统运行图如图5所示。
4 结束语
通过本方案的设计及防弹衣生产线炉温控制现场运行结果分析,温度控制的精度从原来的±1度提升到了±0.1度,很大程度提高了温度控制效果;使用16位AD模拟量采集提高了温度采集精度;使用数字信号传输数据及控制,使得温度反馈及输出控制的时间大大缩短,稳定性大幅度提高,从而提高了产品的质量及生产效率。 |
|



