基于TMS320F2812的快速货车电子防滑器设计 2
|
 
- UID
- 864567
|
基于TMS320F2812的快速货车电子防滑器设计 2
3.2 滑行检测和控制
本文应用模糊控制算法实现防滑控制。为提高DSP运算效率、缩短系统响应时间,系统采用了离线查询的方法实现模糊控制;通过MATLAB/Simulink仿真设计了二维模糊控制器;滑移率的基本论域为[0,0.25],减速度基本论域为[-4,4]。实际控制过程中只要测得滑移率和减速度的量化值,通过查表的方法即可得到当前控制量。电子防滑器的控制输出量为充放气时间(0~500 ms),正值即为充气,负值为放弃,0为保压。
设定CPU定时器0周期中断为5 ms(即单次充放气时间为5 ms),设定CPU定时器2中断周期为100 ms[4](即滑行状态检测周期)。则实际控制中,模糊控制量OP在[-50,50]内即实施保压。
4 防滑模拟试验
为验证防滑器控制效果,本文在实验室进行了防滑模拟试验,如图4所示。试验以LabVIEW软件为平台,模拟整车速度信号和打滑车轴速度信号,通过防滑器对容积室压力的控制模拟,实现对制动缸压力的控制。在计算机上通过LabVIEW编程读取MATLAB/Simulink仿真得到的两路车轴信号,控制NI公司的6008型数据采集卡生成两路与速度成比例的电压信号。该电压信号经电压频率转换电路,得到频率与速度成比例的脉冲信号,速度脉冲信号经信号调理模块的光耦隔离接到DSP的CAP脚。其中电压频率转换选用了AD654芯片来实现。AD654是一款低漂移、线性度高、低成本的电压频率转换芯片,只需要很少的外围元件即可实现电压转换。
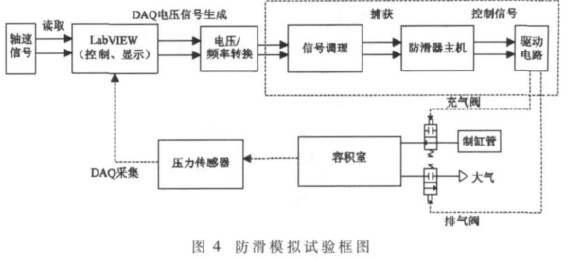
本试验控制对象为容积室,其压力由充气阀和排气阀控制,容积室压力通过压力传感器接到数据采集卡,在计算机上通过LabVIEW编程实时显示容积室压力。
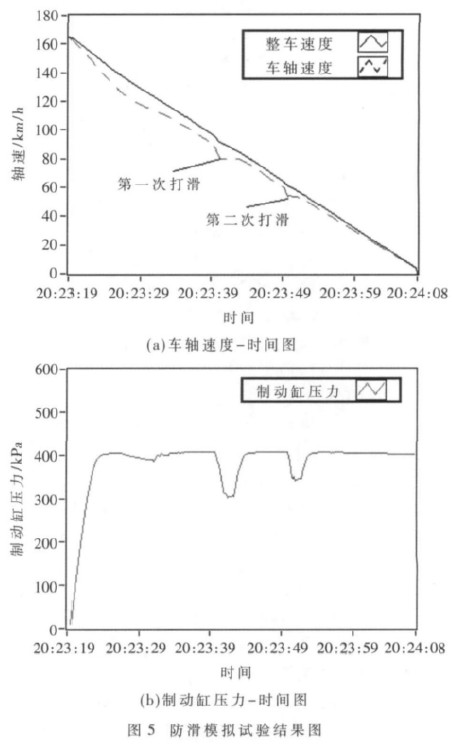
试验模拟车辆在制动过程中出现车轴两次打滑的情况,其结果如图5所示。当防滑器检测到车轴滑行时,实时调整容积室压力,可防止车轴继续滑行,在无滑行后继续恢复容积室压力,以保证制动力的顺利实施。
防滑控制是快速货车制动的关键技术之一,对保障制动安全、提高制动效率具有重要意义。本文设计的基于DSP的快速货车电子防滑器能高精度测量车轴速度,并以模糊控制为算法,根据多滑移判据检测车轴滑行状态,及时调整制动缸压力,防止车轴继续打滑,从而保障制动安全,缩短制动距离,提高了制动效率。经模拟试验表明,本防滑器具有响应快、实时性好、准确性高等特点。 |
|
|
|
|
|



