|

- UID
- 863084
|

由于汽车产业不断追求安全可靠、极致性能、舒适方便以及低成本等目标,但汽车内高复杂的系统网络,使得线束过于庞大,导致成本提高且网络架构也难以持续提升,与前者形成冲突。
于是德国Bosch在1985年提出CAN BUS(Controller Area Network),不但解决了车内线束持续增加的问题,还为日后可靠且有效率的网络系统垫定了基础。1993年,CAN BUS更制定为标准化(ISO-11898),由于具有高可靠性和错误检测能力,也被广泛应用在船舶、航空电子、大众交通、农用设备、医疗设备、工业控制中。
CAN BUS的架构与特色
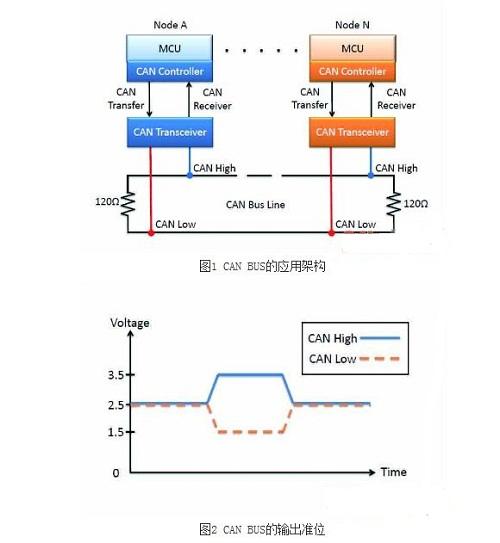
CAN BUS是一种串行双线式差分传输的技术规格(见图1),MCU负责运算数据,CAN Controller处理运算后的数据并传送“0”或“1”数据,经过 CAN Transceiver的转换由CAN High和CAN Low产生差分信号(见图2)。其中,CAN High电压减CAN Low电压小于0.5V代表逻辑状态为“1”,而CAN High电压减 CAN Low电压大于0.9V代表逻辑状态为“0”,所以图2中传送位串为101。藉由差分的方式可以避免噪声的产生,而终端电阻120Ω则是防止信息传送后反射造成的干扰。
CAN BUS上最小单位为节点(Node),每个节点都可以主动发送信息到总线上,也可以要求特定节点回传信息,并不限定于只有一个主控端。每个信息(Message)都是以识别子字段(ID Field )为起头,以识别值决定发送信息的优先权,数值越小优先权越高。所以信息的传递并不是定义在节点上,而是定义在信息上。由于是串接的架构加上识别子(ID)的判定机制,所以软硬件不需要做修正就能够轻易增加或移除节点,不但降低了布线成本也降低了维护的复杂度,这种多主控端架构成就更完整的智能网络设备。
信息传递可透过节点上的设定,使信息可以被每个节点接收至缓冲器内,也可以选择对该信息置之不理。CAN BUS也支持远程数据请求,当该信息识别值符合节点内部的识别值,且该信息是远程信息(Remote Message)时,指定的节点会将相符的数据传送出去。用户便可利用这功能,来进行节点与节点间的沟通。
在CAN BUS上,传输速度最快可达1Mbps,用户可藉由修改位时序设定来修改传输速度,而传输距离随通信速度增加而递减,例如当通信速度40Kbps时,通信距离可达1km;当通信速度1Mbps时,通信距离最远可达40m,据此用户可依照本身的应用做调配。
强大的容错能力
CAN BUS协议具有相当可靠的错误处理和检错机制,这些都是属于硬件自动侦测反应,在此种机制下,网络讯息的传输不但有效率且使用起来更加方便。
自动重传
当总线上的节点侦测到错误时,硬件会自动重新发送该讯息到总线上,直到该讯息有任何节点响应ACK (Acknowledged)后,该讯息才会停止发送。
错误侦测
CAN BUS提供了五种错误侦测机制,分别为位错误(Bit Error),填充位错误(Stuff Error),循环冗余代码校验(CRC Error),格式错误(Form Error),响应错误(Ack Error),利用这些错误侦测机制,使得总线上的传输更加稳定,而不需用户介入。
错误通知
侦测到错误发生时,节点会发送错误讯息(Error Message)到总线上,使得总线上的所有节点都知道此时有错误发生,以便作出相对的反应,包括重传或停止发送等。
错误恢复与排除
在CAN协议中规范了每个节点都有传送错误记数器(TEC: Transmit Error Counter)和接收错误记数器(REC: Receive Error Counter),根据TEC和REC的值来决定目前节点为何种状态,一旦TEC大于255,硬件会让该节点脱机且暂时不接收与发送讯号到总线上,待特定情况发生时,用户才可将该节点重新初始化,并重新开始监控总线上的讯号,如此一来,可避免因各别节点使总线发生严重错误,影响其他节点的传输。 |
|



