|

- UID
- 1023166
- 性别
- 男
- 来自
- 燕山大学
|

关键词: 51单片机 , 串口
单片机通信是指单片机与计算机或单片机与单片机之间的信息交换,通常单片机与计算机之间的通信我们用的较多。通信有并行和串行两种方式。串行通信又有两种方式:异步串行通信和同步串行通信。
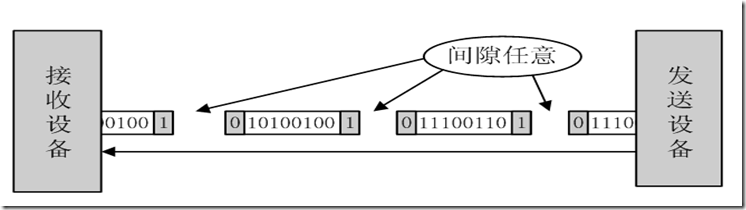
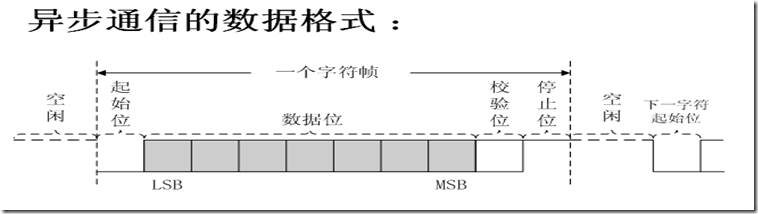
异步通信是以字符(构成的帧)为单位进行传输,字符与字符之间的间隙(时间间隔)是任意的,但每个字符中的各位是以时间传送的,即字符之间不一定有“位间隔”的整数倍关系,但同一字符内的各位之间的距离均为“位间隔”的整数倍。
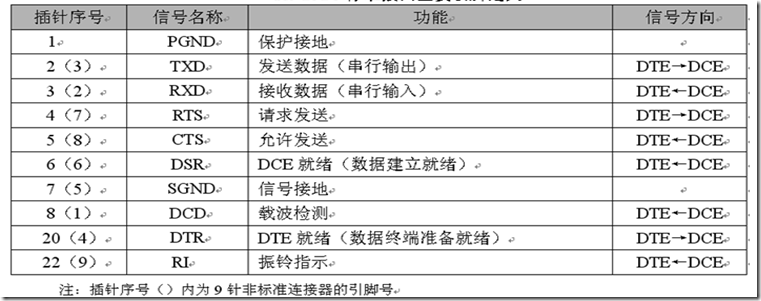
DB25与DB9:

80C51串行口的结构:
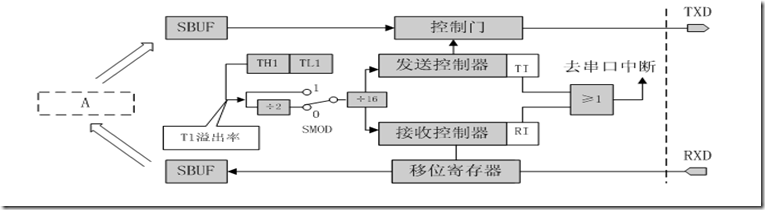
有两个物理上独立的接受,发送寄存器SBUF,它们占用同一地址99H;接收器是双缓冲结构;发送
缓冲器,因为发送时CPU是主动的,不会产生重叠错误。
RS232C标准接口主要引脚定义:
串行口控制寄存器SCON是一个特殊功能的寄存器,用以设定串行口的工作方式,接受发送控制及设
置状态标志。

SM0,SM1工作方式选择位,SM2多机通信控制位,REN允许串行接收位,TI发送中断标志位,RI接
收中断标志位。串行发送停止位的开始时,由内部硬件使TI置1,向CPU发出中断申请。在中断服务
程序中,必须用软件将其清0,取消此中断申请。
电源管理寄存器PCON也是一个特殊功能寄存器,字节地址为87H,不能位寻址,PCON用来管理单片
机的电源部分,包括上电复位检测,掉电模式,空闲模式等。单片机复位时PCON全部被清0。

SMOD该位与串口波特率有关,SMOD=0,串口方式1,2,3时,波特率正常。SMOD=1,串口方式1,2,3时,波特率加倍。
用软件置REN为1时,接收器会以所选择波特率的16倍速采样RXD引脚电平,检测到RXD引脚输入电平发生
负跳变时,则说明起始位有效,将其移入输入移位寄存器,并开始接受这一帧信息的其余位。接受过
程中,数据从输入移位寄存器的右边输入,起始位移至输入移位寄存器最左边时,控制电路进行最后
一次移位。当RI = 0,且SMOD = 0(或接受到的停止位为1)时,将接收到的9位数据的前8位数据
装入接受SBUF,第9位进入RB8,并置RI=1,向CPU中断请求。
在具体操作串行口之前,需要对单片机一些与串行口有关的特殊功能寄存器进行初始化设置:
确定T1的工作方式(编程TMOD寄存器)
计算T1的初值,装载TH1,TL1
开启T1(编程TCON中的TR1位)
设置串口的工作方式(编程SCON寄存器)
串行口工作在中断方式下,要进行中断设置(IE寄存器)
波特率计算公式:
方式0的波特率=fosc/12。
方式1的波特率=(2^smod/32)*(T1溢出率)。
方式2的波特率=(2smod/64)*fosc。
方式3的波特率=(2smod/32)*(T1溢出率)。
T1溢出率=fosc/{12*[256-(TH1)]}
fosc为系统晶振频率,通常为12MHZ或11.05926MHZ
异步串口通信两种方式:轮询和中断
下面是一个中断程序,使用串口调试工具发出什么返回什么。
#include <reg52.h>
unsigned char a,flag;
void main(){
TMOD = 0x20; //工作方式2,8位自动重装定时/计数器
TH1 = 0xfd; //波特率为9600bps,系统晶振频率为11.0592MHZ时需要装入的
TL1 = 0xfd; //TH1,TL1的值可以通过公式 T1溢出率=fosc/{12*[256-(TH1)]}
EA = 1; //开启CPU中断允许位
ES = 1; //开始串口中断允许位
SM1 = 1; //设置串口的工作方式为01即方式1,10位异步收发(8位数据)
TR1 = 1; //T1开启
REN = 1; //允许串行接受位
while(1){
if(flag == 1){
ES = 0; //关闭串口中断,防止发送数据时产生中断
SBUF = a; //将数据送到发送缓冲寄存器
while(!TI); //发送当停止位开始时,会产生中断,把TI置1
TI = 0;
flag = 0;
ES = 1; //允许中断
}
}
}
void uart() interrupt 4{
a = SBUF; //当产生RI中断时说明数据接收完毕,把数据赋给变量a
RI = 0; //软件方法把RI置0
flag = 1;
}
轮询方式,如果有数据输入发送给串口,当停止位开始时,蜂鸣器响起。
#include <reg52.h>
#define uchar unsigned char
sbit buzzer=P3^4;
void delay(uchar z)
{
uchar x,y;
for(x=1000;x>1;x--)
for(y=z;y>1;y--);
}
void main(){
TMOD = 0x20; //工作方式2,8位自动重装定时/计数器
TH1 = 0xfd; //波特率为9600bps,系统晶振频率为11.0592MHZ时需要装入的
TL1 = 0xfd; //TH1,TL1的值可以通过公式 T1溢出率=fosc/{12*[256-(TH1)]}
EA = 1; //开启CPU中断允许位
ES = 1; //开始串口中断允许位
SM1 = 1; //设置串口的工作方式为01即方式1,10位异步收发(8位数据)
TR1 = 1; //T1开启
REN = 1; //允许串行接受位
while(1){
if(RI == 1){ //大循环进行轮询,如果串行发送停止位开始,则RI会被硬件置1
RI = 0;
buzzer=0;
delay(10);
buzzer=1;
delay(10);
}
}
}
两个纠结的程序:
由上位机发送1给单片机时,蜂鸣器以400ms频率发声,发2时以200ms频率发声,发3时以100ms频率发声,发4时关闲蜂鸣器。
#include<reg52.h>
unsigned char flag,a,num,benum;
sbit beep=P3^4;
void main()
{
TMOD=0x21;//设置定时器1为工作方式2
TH1=0xfd;
TL1=0xfd;
TH0=(65536-50000)/255;
TL0=(65536-50000)%255;
TR1=1;
ET0=1;
SM0=0;
SM1=1;
REN=1;
EA=1;
ES=1;
while(1)
{
if(flag==1)
{
EA=0;
flag=0;
TR0=1;
if(a==1)
benum=4;
if(a==2)
benum=2;
if(a==3)
benum=1;
if(a==4)
{
TR0=0;
beep=1;
}
EA=1;
}
}
}
void ser() interrupt 4
{
RI=0;
a=SBUF;
flag=1;
}
void time0() interrupt 1
{
TH0=(65536-50000)/255;
TL0=(65536-50000)%255;
num++;
if(num>=benum)
{
num=0;
beep="beep;
}
}
以2400bps从计算机发送任一字节数据,当单片机收到该数据后,在此数据前加上一序号然后连同此数据一起发送至计算机,当序号超过255时归零。
#include<reg52.h>
unsigned char flag,a,num,num1;
sbit beep=P3^4;
void main()
{
TMOD=0x20;//设置定时器1为工作方式2
TH1=0xf4;
TL1=0xf4;
TR1=1;
SM0=0;
SM1=1;
REN=1;
EA=1;
ES=1;
while(1)
{
if(flag==1)
{
ES=0;
flag=0;
num1++;
if(num1==255)
num1=0;
SBUF=num1;
while(!TI);
TI=0;
SBUF=a;
while(!TI);
TI=0;
ES=1;
}
}
}
void ser() interrupt 4
{
RI=0;
a=SBUF;
flag=1;
}
李万鹏 |
|
|



