|

- UID
- 1023166
- 性别
- 男
- 来自
- 燕山大学
|

关键词: 51单片机 , DS18B20 , 温度传感器
温度传感器是各种传感器中最常用的一种,早期使用的是模拟温度传感器,如热敏电阻,随着环境温度的变化,它的阻值也发生线性变化,用处理器采集电阻两端的电压,然后根据某个公式就可以计算出当前环境温度。美国DALLAS半导体公司推出的数字化温度传感器DS18B20采用单总线协议,即与单片机接口仅需占用一个I/O端口,无需任何外部元件,直接将环境温度转化成数字信号,以数字码方式串行输出,从而大大简化了传感器与处理器的接口。
DS18B20的三种封装:
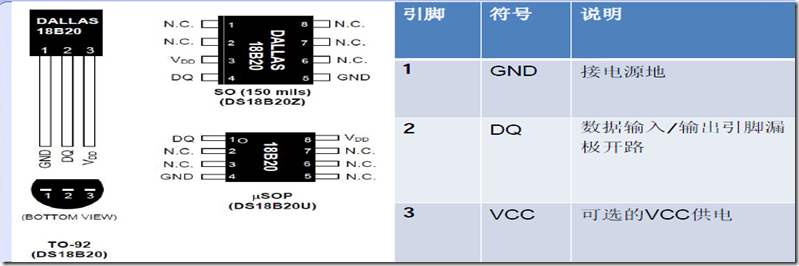
DS18B20的内部结构:
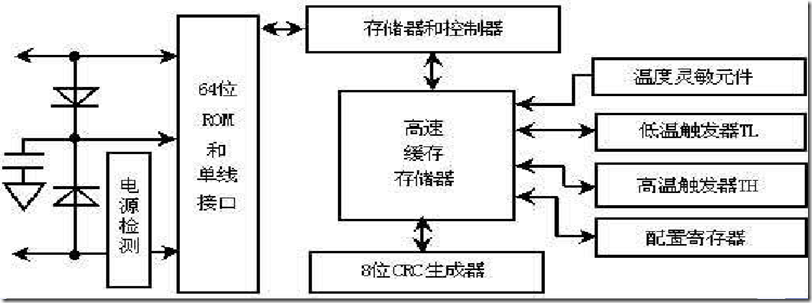
它采用单条信号线,既可传输时钟,又可传输数据,而且数据传输是双向的。如果要控制多个DS18B20进行温度采集,只要将所有的DS18B20的I/O口全部连接到一起就可以了。在具体操作时,通过读取每个DS18B20内部芯片的序列号来识别。64位光刻ROM中的序列号是出场前被光刻好的,他可以看做该DS18B20的地址序列码。
DS18B20的复位时序:

DS18B20复位,确定其存在: #include <reg52.h>
#define uint unsigned int
uint i;
sbit DQ = P3^3;
sbit bell = P3^4;
void reset(){
DQ = 1; //开始的时候是高脉冲
DQ=0; //然后是低脉冲
i=103;
while(i>0)i--; //低脉冲需要延迟一会儿
DQ=1; //数据线拉高,系统将总线放开,并进入接受状态
i=4;
while(i>0)i--; //延时等待,若初始化成功则在15"60ms内产生一个由
if(DQ == 0){ //DS18B20在检测到总线的上升沿后,等待15"60ms,接着
while(DQ == 0); //在T2时刻发出存在脉冲(低电平)
bell = 0;
}
else
bell = 1;
}
void main(){
reset();
while(1);
}
DS18B20的写0和写1时序:

DS18B20的读数据时序:

读出光刻ROM中的ID号,在LCD上显示:
#include <reg52.h>
#include<intrins.h>
sbit DQ = P3^3;
sbit RS = P1^0;
sbit RW = P1^1;
sbit E = P1^2;
sbit bell = P3^4;
#define uchar unsigned char
#define uint unsigned int
#define nop() _nop_()
uint i;
uchar value;
uchar DS[8];
uchar Time_Data[]={'0','1','2','3','4','5','6','7',
'8','9','A','B','C','D','E','F'};
void delay(uchar t){
while(--t);
}
void lcd_com(uchar s){
RS = 0; //低电平,写指令
P2 = s; //传数据
delay(14); //看时序图,数据需要稳定一段时间
E = 1; //给一个高脉冲,发送命令
delay(14); //如图,高脉冲延时一段时间,确保命令发送
E = 0; //发送结束E置为低电平
}
void lcd_data(uchar s){
RS = 1;
P2 = s;
delay(14);
E = 1;
delay(14);
E = 0;
}
void init_lcd(){
RS = 1; //先发指令,在初始时刻RS是高,E和RW是低
E = 0;
RW = 0;
lcd_com(0x38); //设置为16*2显示,5*7点阵,8位数据接口
lcd_com(0x0f); //开显示,显示光标,光标闪烁
lcd_com(0x06); //读写一个字符后地址指针加一
lcd_com(0x01);
}
void Display_lcd(uchar y, uchar x, uchar value){
if(y)
lcd_com(0x80+0x40+x); //如果y为1,写在第二行
else
lcd_com(0x80+x);
lcd_data(value); //写到LCD602上
}
void DS18B20_reset(){
DQ = 1; //开始的时候是高脉冲
DQ=0; //然后是低脉冲
i=103;
while(i>0)i--; //低脉冲需要延迟一会儿
DQ=1; //数据线拉高
i=4;
while(i>0)i--; //延时等待,若初始化成功则在15"60ms内产生一个由
if(DQ == 0){ //DS18B20返回的低电平
while(DQ == 0);
// bell = 0;
}
else
bell = 1;
}
uchar DS18B20_read(void)
{
uchar i = 0;
uchar Value = 0;
for(i = 0; i < 8; i ++)
{
DQ = 1;
DQ = 0;
delay(1);
DQ = 1; //在T1时刻将总线拉高,产生读时间隙
delay(1); //读时隙在T1和T2之间有效
if(DQ)
{
Value |= 0x01 << i;
}
delay(17); //必须在T3时刻之间主机完成读操作
DQ = 1;
nop();
}
return Value;
}
void DS18B20_write(uchar Value){
for(i = 0; i < 8; i++){
DQ = 1;
DQ = 0; //当t0从高拉低产生写时隙,
delay(5);
DQ = Value & 0x01; //必须在t0开始的15us内将数据送到总线上
delay(20); //DS18B20在t0后的15us"60us内对总线采样
DQ = 1; //如果采到低电平则写入0,高电平写入1
Value >>= 1;
delay(2);
}
}
void DS18B20_ID_read(){
DS18B20_reset();
DS18B20_write(0x33);
for(i = 0; i < 8; i++)
DS[ i] = DS18B20_read();
}
void main(){
init_lcd();
while(1){
DS18B20_ID_read();
Display_lcd(0,0,'>');
Display_lcd(0,1,':');
Display_lcd(0,2,Time_Data[DS[0]/16]);
Display_lcd(0,3,Time_Data[DS[0]%16]);
Display_lcd(0,4,'>');
Display_lcd(0,5,':');
Display_lcd(0,6,Time_Data[DS[1]/16]);
Display_lcd(0,7,Time_Data[DS[1]%16]);
Display_lcd(0,8,'>');
Display_lcd(0,9,':');
Display_lcd(0,10,Time_Data[DS[2]/16]);
Display_lcd(0,11,Time_Data[DS[2]%16]);
Display_lcd(0,12,'>');
Display_lcd(0,13,':');
Display_lcd(0,14,Time_Data[DS[3]/16]);
Display_lcd(0,15,Time_Data[DS[3]%16]);
Display_lcd(1,0,'>');
Display_lcd(1,1,':');
Display_lcd(1,2,Time_Data[DS[4]/16]);
Display_lcd(1,3,Time_Data[DS[4]%16]);
Display_lcd(1,4,'>');
Display_lcd(1,5,':');
Display_lcd(1,6,Time_Data[DS[5]/16]);
Display_lcd(1,7,Time_Data[DS[5]%16]);
Display_lcd(1,8,'>');
Display_lcd(1,9,':');
Display_lcd(1,10,Time_Data[DS[6]/16]);
Display_lcd(1,11,Time_Data[DS[6]%16]);
Display_lcd(1,12,'>');
Display_lcd(1,13,':');
Display_lcd(1,14,Time_Data[DS[7]/16]);
Display_lcd(1,15,Time_Data[DS[7]%16]);
}
}
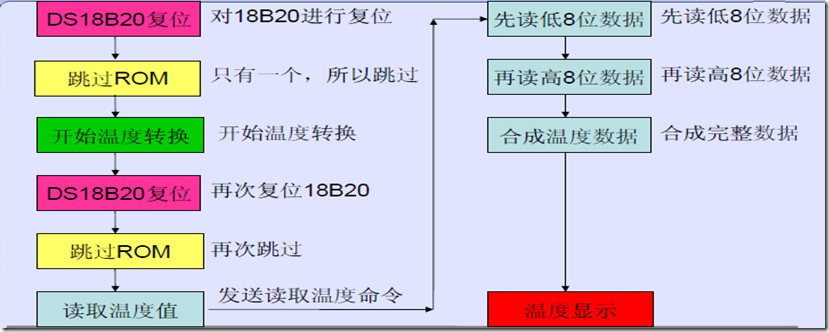
单只DS18B20工作流程:
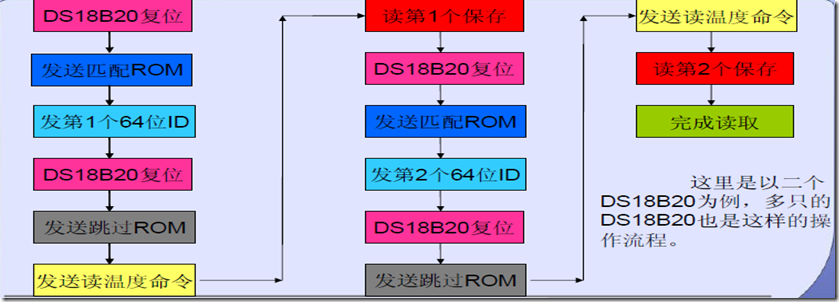
2只DS18B20并联工作流程:
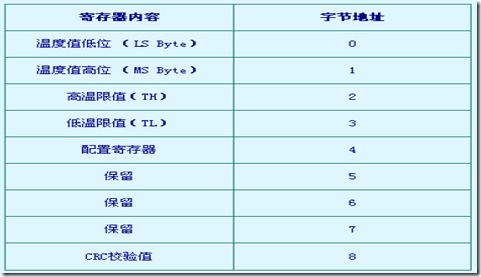
DS18B20温度存储格式:

DS18B20暂存器的分布:
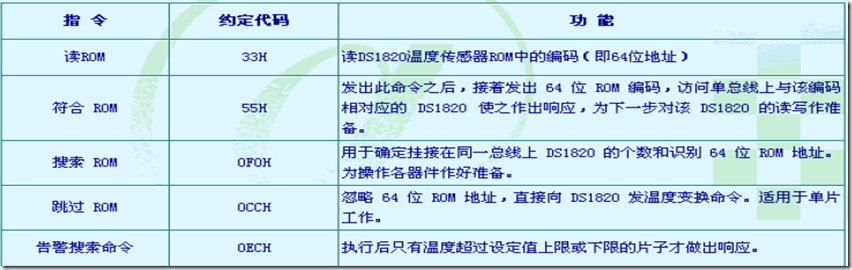
DS18B20内部ROM指令:
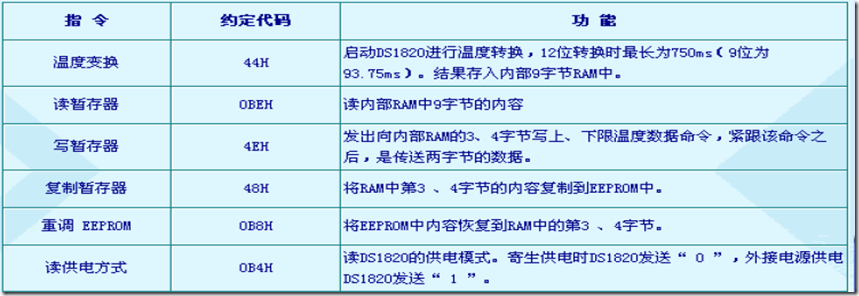
DS18B20内部RAM指令:
读出当前温度,在LCD上显示,温度超过一定时,报警。
#include <reg52.h>
#include<intrins.h>
sbit DQ = P3^3;
sbit RS = P1^0;
sbit RW = P1^1;
sbit E = P1^2;
sbit bell = P3^4;
#define uchar unsigned char
#define uint unsigned int
#define nop() _nop_()
uint i;
uchar value;
uchar DS[8];
uchar Time_Data[]={'0','1','2','3','4','5','6','7',
'8','9','A','B','C','D','E','F'};
void delay(uchar t){
while(--t);
}
void Lcd_Com(uchar s){
RS = 0; //低电平,写指令
P2 = s; //传数据
delay(14); //看时序图,数据需要稳定一段时间
E = 1; //给一个高脉冲,发送命令
delay(14); //如图,高脉冲延时一段时间,确保命令发送
E = 0; //发送结束E置为低电平
}
void Lcd_Data(uchar s){
RS = 1;
P2 = s;
delay(14);
E = 1;
delay(14);
E = 0;
}
void Init_Lcd(){
RS = 1; //先发指令,在初始时刻RS是高,E和RW是低
E = 0;
RW = 0;
Lcd_Com(0x38); //设置为16*2显示,5*7点阵,8位数据接口
Lcd_Com(0x0f); //开显示,显示光标,光标闪烁
Lcd_Com(0x06); //读写一个字符后地址指针加一
Lcd_Com(0x01);
}
void Display_Lcd(uchar y, uchar x, uchar value){
if(y)
Lcd_Com(0x80+0x40+x); //如果y为1,写在第二行
else
Lcd_Com(0x80+x);
Lcd_Data(value); //写到LCD602上
}
void DS18B20_Reset(){
DQ = 1; //开始的时候是高脉冲
DQ=0; //然后是低脉冲
i=103;
while(i>0)i--; //低脉冲需要延迟一会儿
DQ=1; //数据线拉高
i=4;
while(i>0)i--; //延时等待,若初始化成功则在15"60ms内产生一个由
if(DQ == 0){ //DS18B20返回的低电平
while(DQ == 0);
// bell = 0;
}
else
bell = 1;
}
uchar DS18B20_Read(void)
{
uchar i = 0;
uchar Value = 0;
for(i = 0; i < 8; i ++)
{
DQ = 1;
DQ = 0;
delay(1);
DQ = 1;
delay(1);
if(DQ)
{
Value |= 0x01 << i;
}
delay(17);
DQ = 1;
nop();
}
return Value;
}
void DS18B20_Write(uchar Value){
for(i = 0; i < 8; i++){
DQ = 1;
DQ = 0;
delay(5);
DQ = Value & 0x01;
delay(20);
DQ = 1;
Value >>= 1;
delay(2);
}
}
uchar DS18B20_Temp_Read(){
uchar temp_h,temp_l,temp;
DS18B20_Reset(); //复位
DS18B20_Write(0x0cc); //跳过ROM,只有一个所以跳过
DS18B20_Write(0x44); //开始温度转换
DS18B20_Reset(); //复位
DS18B20_Write(0x0cc); //跳过ROM
DS18B20_Write(0x0be); //读暂存器
temp_l = DS18B20_Read(); //读出温度低8位
temp_h = DS18B20_Read(); //读出温度高8位
temp_l >>= 4; //去掉4位小数位
temp_h <<= 4; //去掉4位符号位
temp = temp_h | temp_l;
temp = temp & 0x7f; //最高位是符号位
return temp;
}
void main(){
uchar temp;
Init_Lcd();
while(1){
temp = DS18B20_Temp_Read();
if(temp > 25) //如果温度大于25报警
bell = 0;
else
bell = 1;
Display_Lcd(0,0,'T');
Display_Lcd(0,1,'E');
Display_Lcd(0,2,'M');
Display_Lcd(0,3,'P');
Display_Lcd(0,4,':');
Display_Lcd(0,5,Time_Data[temp/100]);
Display_Lcd(0,6,Time_Data[temp%100/10]);
Display_Lcd(0,7,Time_Data[temp%10]);
}
}
|
|
|



