|

- UID
- 1023166
- 性别
- 男
- 来自
- 燕山大学
|

0 引言 本文针对矿用永磁操动机构馈电开关智能控制器采用的铅酸蓄电池在充电过程中存在充电过度、充电不足、电池过热和充电速度慢等诸多问题,提出了一种以atmega16 单片机为核心的智能充电器设计方案。采用了基于sugeno 推理的模煳PID 控制算法,提高了充电器的充电速度,减少了电池损耗,实现了对铅酸蓄电池充电过程的智能化控制。
目前矿用永磁操动机构馈电开关智能控制器采用铅酸蓄电池作为备用电源。传统的铅酸蓄电池充电方法有恒流限压充电和恒压限流充电,但充电效果都不是很理想,一方面这些方法充电时间过长,温升过快。另一方面,充电过程中存在过充和欠充现象。专家研究表明:铅酸蓄电池充电过程对其寿命影响最大,过充电、充电不足以及温升都是引起电池故障的主要原因。
基于以上原因,系统根据蓄电池的充电特性,采用基于sugeno 推理的模煳PID 控制算法,设计了以atmega16 单片机为核心的智能充电器,它能够实时采集电池充电过程中的电流、电压、温度等模拟量,使充电始终在最佳状态下进行,实现了高效、快速、无损的充电过程。
1 系统总体结构设计
系统选取ATMEL 公司生产的 atmega16 单片机作为核心控制芯片。总体结构包括:电源模块、充电主电路模块、模拟量检测模块、显示及报警模块和IGBT 驱动模块。系统总体结构如图1 所示。
 在充电过程中,单片机实时采集电池充电过程中的电流、电压和温度等模拟量,通过其内部的A/D 转换器将上述模拟量转化为数字量,并判断电池是否出现过压、过流和过温等故障。若出现故障,单片机立即关断IGBT,并发出声光报警。若检测正常,则采用基于sugeno 推理的模煳PID 控制算法产生相应占空比的PWM 脉冲来控制IGBT 开关,通过BUCK 电路对电池进行充电。
2 系统硬件电路设计
2.1 充电主电路设计
充电主电路其实是一个BUCK 变换器,BUCK 电路属于降压斩波电路。充电主电路如图3 所示。IGBT、二极管、电感L1 和电容C10 构成BUCK 电路,220V市电经变压器降压,通过整流桥整流和EMI平滑滤波后,作为直流充电电源。在工作过程中,PWM 控制信号的高电平脉冲出现,使IGBT 导通,电感L1 的电流不断增大,并对电容C10 储能,同时对电池充电。此时,续流二极管因反向偏置而截止。PWM 信号出现低电平时,IGBT 截止,电感L1 维持原电流方向,与续流二极管构成充电回路,利用L1 和C10 中存储的电能向电池充电。
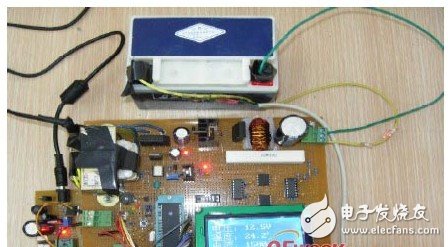 图2 充电器实物图  图3 充电主电路 2.2 模拟量检测模块
2.2.1 电压检测电路设计
电压检测电路采用线性光耦HCNR201 将噪声信号与单片机系统隔离开来,电压检测电路如图4 所示。
 图4 电压检测电路 在正常充电的过程中,电池端电压Ubat 的变化范围是9V-15V,而单片机检测电压的范围是0-5V,所以通过R27 和Rw4 对电池两端的电压进行分压,通过调节Rw4 的阻值来限定运算放大器1 的输入电压,使其始终保持在0-5V.电阻R24 来控制初级运放输入偏置电流的大小,C20 起反馈作用,同时滤除了电路中的毛刺信号,避免HCNR201 的发光二极管LED 受到意外的冲击。R23 可以控制LED 的发光强度,从而对控制通道增益起一定作用。运算放大器2 和电阻R14将线性光耦HCNR201 的输出电流信号转化成输出电压信号送入单片机。
2.2.2 电流检测电路设计
充电电流是通过检测充电回路电阻两端的电压,并通过计算其与充电回路电阻的比值得到的。因此电流检测电路与电压检测电路基本相同,区别在于电流充电回路电阻两端电压已经在0-5V 范围内,不需要电阻分压。
2.2.3 温度检测电路设计
温度检测电路如图5 所示。选用数字温度传感器DS18B20 检测电池温度,紧贴电池安装,当电池温度变化时,DS18B20 输出引脚输出相应的信号,单片机将该信号转化为温度显示在液晶屏上。当温度超过设定值时,发出报警信号。
 图5 温度检测电路 2.3 显示及报警模块
显示模块主要是采用北京铭正同创科技有限公司生产的12864LCD 液晶显示器。该液晶显示器显示的内容包括:电池充电电流、电压、温度和充电状态等信息。
报警模块的主要功能是当电池在充电过程中发生过压、过流和过温等情况时立即报警,并在12864 液晶屏上显示故障原因,同时关断IGBT 开关管。
2.4 IGBT 驱动模块
IGBT 的驱动电路如图6 所示。为了提高系统的抗干扰能力,采用光耦TLP250 作为IGBT 的核心驱动芯片。TLP250 光耦既保证了功率驱动电路与PWM 脉宽调制电路的可靠隔离,又具备了直接驱动IGBT 的能力,使驱动电路简单。
 图6 IGBT 驱动电路 3 模煳控制设计
采用基于sugeno 推理的模煳PID 控制算法实现模煳控制器设计,输入量为理想电流与实际电流之差ΔI和ΔI 的变化率ΔI/t,模煳控制器输出为以比例、积分、微分控制的充电电流值,该控制算法简化了控制器的结构、提高了抗干扰性和鲁棒性[4-6]。模煳控制器的总体结构图如图7 所示。
 图7 模煳控制器总体结构图 3.1 输入语言变量的隶属函数
模煳控制器定义输入偏差e(t)和偏差变化率ec(t)均有3 个模煳语言变量值:{ B(大)、M(中)、S(小)},它们的隶属函数均采用对称、全交叠的结构。输入偏差e(t)和偏差变化率ec(t)的隶属度函数如图8 所示。
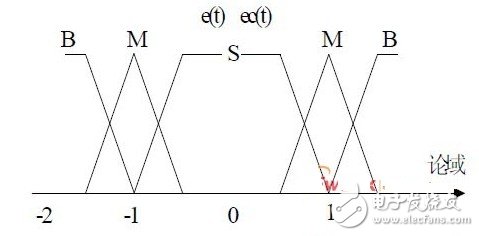 图8 e(t)和ec(t)的隶属度函数 3.2 模煳控制规则
模煳控制器设计的核心是模煳控制规则的选取和确定,本模煳控制器根据实际充电情况建立了基于sugeno 推理方式的五条模煳控制规则:
规则1:If e is B then νp is νp1,νi is νi1,νd is νd1;
规则2:If e is M and ec is B then νp is νp2, νi isνi2,νd is νd2;
规则3:If e is M and ec is M then νp is νp3,νi isνi3,νd is νd3;
规则4:If e is M and ec is S then νp is νp4, νi isνi4,νd is νd4;
规则5:If e is S then νp is νp5, νi is νi5,νd is νd5;
3.3 输出语言变量值
模煳控制器采用sugeno 模煳推理方式,其输出语言变量νp, νi ,νd 在下述五种控制规则中的取值如表1所示。

表1 νp,νi,νd 取值表 3.4 模煳推理算法
sugeno 型模煳推理算法,与其它类型的模煳推理算法不同,该算法可将去模煳化结合到模煳推理中,即在sugeno 型模煳规则后件部分,将输出量表示为输入量的线性组合,因此输出为精确量,这是由sugeno型模煳规则的形式所决定的。针对上述模煳控制规则,可调因子 νp,νi 和νd 的推理计算公式为:

其中,隶属度值为:
 由此建立了PID 控制器参数的可调因子νp,νi 和νd与偏差e 和ec 之间的模煳函数关系,实现了PID 参数Kp, Ki 和Kd 的模煳在线自调整,满足了系统的要求。
4 实验
采用基于sugeno 推理的模煳PID 控制算法设计的智能型铅酸蓄电池充电器和普通的铅酸蓄电池充电器分别对电池进行充电实验。实验对象采用的是廊坊东叁星蓄电池有限公司生产的12V、4A h 铅酸蓄电池。
充电时间为140 分钟,每隔5 分钟记录一次电流和温度值。两种模式下的充电电流曲线如图9 所示,两种模式下的充电温度曲线如图10 所示。
 图9 两种模式下的充电电流曲线  图10 两种模式下的充电温度曲线 5 结论
本文以atmega16 单片机作为控制核心,设计了对铅酸蓄电池智能充电器的硬件方案,并采用了一种基于sugeno 推理的模煳PID 控制算法,优化了铅酸蓄电池的充电过程,保证了矿用永磁操动机构馈电开关智能控制器备用电源的安全使用。实验结果表明,该设计方案解决了铅酸蓄电池充电过程中存在的过充电、充电不足和发热等问题,并在加快充电速度,减少能量损耗、延长使用电池寿命等方面效果显着。 |
|



