对于移动机器人,键盘的控制往往满足不了我们的需求,以前看好多电影里边都是用一个摇杆来控制机器人的,简直帅爆了,正好我这里有一个操作杆,那就来尝试感受一下。
操作杆(joystick)控制会更加有操作感,ROS中的很多机器人也带有操作杆的相关代码,只需要简单的移植即可。我们使用的是赛钛客(saitek)的一款操作杆,如下图所示:

使用的移植代码是clearpath_husky机器人中的python代码。
参考链接: http://www.ros.org/wiki/joy
一、测试操作杆驱动
首先将操作杆的接口插入电脑,然后在终端中输入:

显示如下:

其中的js0就代表我们的操作杆。然后测试操作杆的操作是否有效,输入:

然后会在终端中显示操作杆的各个控制值的即时值,操作操作杆,如果每个按键和操作都有效,说明操作杆是正常的。最后在ROS中的节点里进行测试。打开joy节点:

再打开一个窗口,输入下面命令,查看数据:

操作操作杆,窗口下面的数据就开始刷新。
二、控制代码
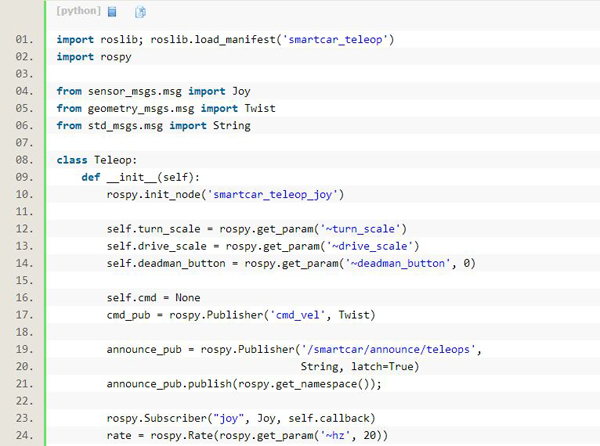
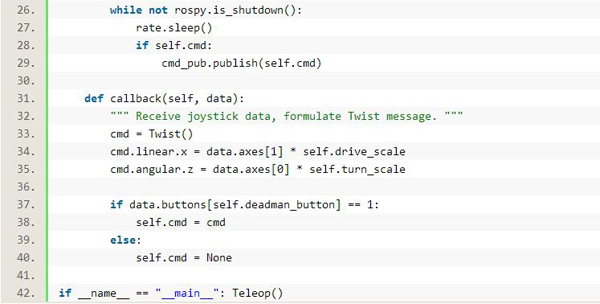
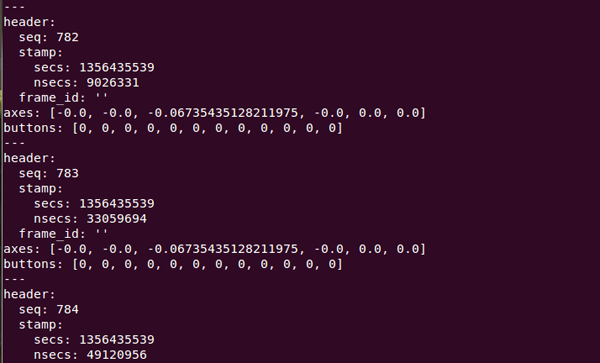
从上面的测试中,我们发现在前后左右摇动操作杆时,相应改变的数据是Axes中0号和1号位的数据,也是我们最常用的数据,其他按键对应的位置也可以找到,编程的时候就是利用的这些数据位置,所以一定要找到每个按键的对应编号。
ROS中已经为我们建立了操作杆的数据结构:
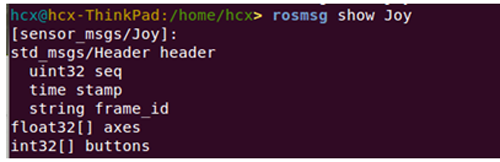
我们主要用到的就是axes和buttons数据。最终的代码如下:
三、机器人控制
首先来创建一个launch文件(teleop_joy.launch):
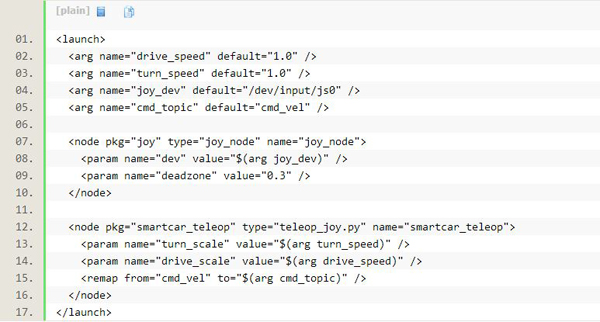
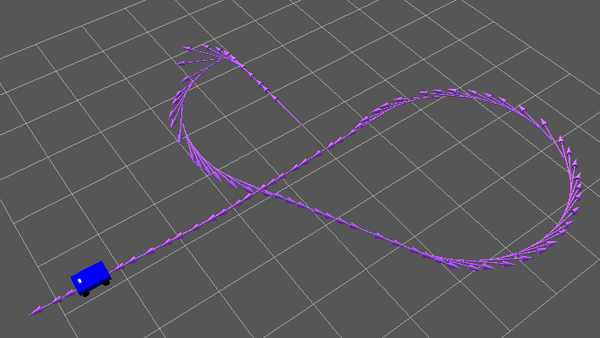
在rviz中打开我们的机器人模型,然后打开操作杆的控制节点:

然后按住刹车键进行操作,机器人就可以开始移动了:
在新终端中输入:

可以查看到实时的操作杆控制数据:
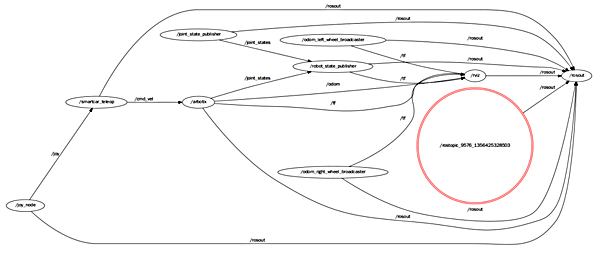
四、节点关系图
转载自:古-月的博客 |






