首页
|
新闻
|
新品
|
文库
|
方案
|
视频
|
下载
|
商城
|
开发板
|
数据中心
|
座谈新版
|
培训
|
工具
|
博客
|
论坛
|
百科
|
GEC
|
活动
|
主题月
|
电子展
注册
登录
论坛
博客
搜索
帮助
导航
默认风格
uchome
discuz6
GreenM
»
FPGA/CPLD可编程逻辑
» ROS探索总结(四)—— 简单的机器人仿真
返回列表
回复
发帖
发新话题
发布投票
发布悬赏
发布辩论
发布活动
发布视频
发布商品
ROS探索总结(四)—— 简单的机器人仿真
发短消息
加为好友
pengpengpang
(pengpengpang)
当前离线
UID
1023229
帖子
6106
精华
0
积分
3055
阅读权限
90
来自
中国
在线时间
156 小时
注册时间
2013-12-20
最后登录
2016-7-3
论坛元老
UID
1023229
来自
中国
1
#
打印
字体大小:
t
T
pengpengpang
发表于 2014-9-9 17:20
|
显示全部帖子
ROS探索总结(四)—— 简单的机器人仿真
机器人仿真
,
亚马逊
,
价值
前边我们已经介绍了ROS的基本情况,以及新手入门ROS的初级教程,现在就要真正的使用ROS进入机器人世界了。接下来我们涉及到的很多例程都是《ROS by Example》这本书的内容,我是和群里的几个人一起从国外的亚马逊上买到的,还是很有参考价值的,不过前提是你已经熟悉之前的新手教程了。
一、ROS by Example
这本书是关于国外关于ROS出版的第一本书,主要针对Electric和Fuerte版本,使用机器人主要是TurtleBot。书中详细讲解了关于机器人的基本仿真、导航、路径规划、图像处理、语音识别等等,而且在google的svn上发布了所有代码,可以通过以下命令下载、编译:
svn checkout
http://ros-by-example.googlecode.com/svn/trunk/rbx_vol_1
rosmake rbx_vol_1
rospack profile //加入ROS package路径
二、rviz简单机器人模拟
1、安装机器人模拟器
rviz是一个显示机器人实体的工具,本身不具有模拟的功能,需要安装一个模拟器arbotix。
svn checkout
http://vanadium-ros-pkg.googlecode.com/svn/trunk/arbotix
rosmake arbotix
2、TurtleBot机器人的模拟
在书中的rbx_vol_1包里已经为我们写好了模拟的代码,我们先进行实验,完成后再仔细研究代码。
机器人模拟运行:
roscore
roslaunch rbx1_bringup fake_pi_robot.launch
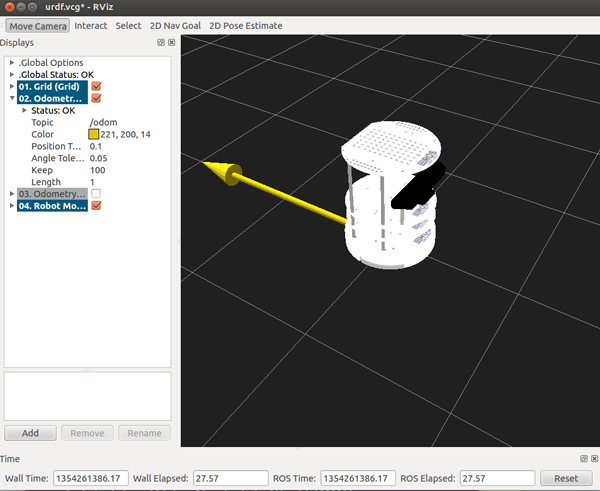
然后在终端中可以看到,机器人已经开始运行了,打开rviz界面,才能看到机器人实体。
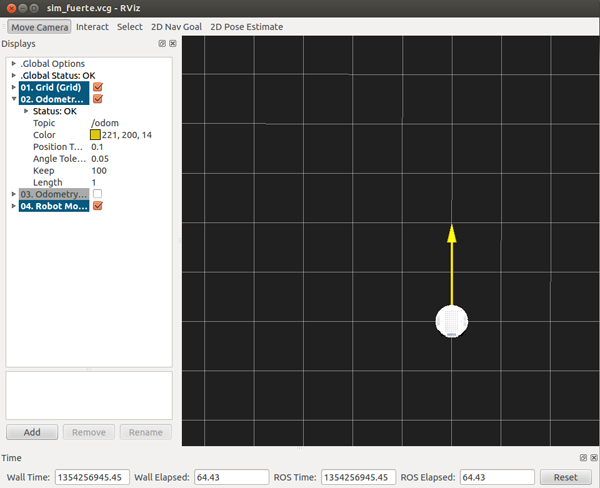
rosrun rviz rviz -d `rospack find rbx1_nav`/sim_fuerte.vcg
后面的参数是加载了rviz的配置文件sim_fuerte.vcg。效果如下:
此时的机器人是静止的,需要发布一个消息才能让它动起来。
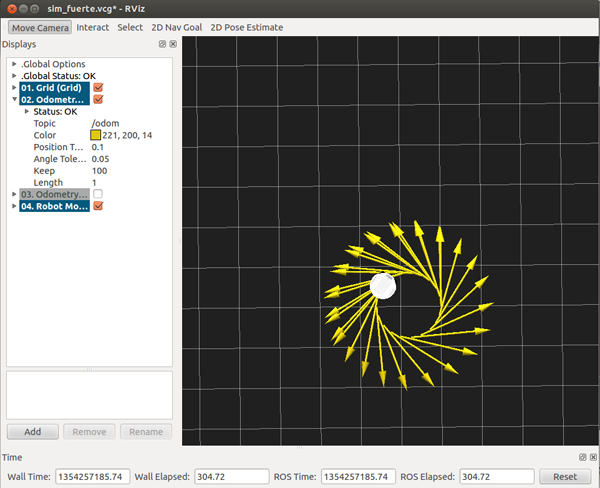
rostopic pub -r 10 /cmd_vel geometry_msgs/Twist '{linear: {x: 0.2, y: 0, z: 0}, angular: {x: 0, y: 0, z: 0.5}}'
如果要让机器人停下来,需要在中断中按下“Ctrl+c”,然后输入:
rostopic pub -1 /cmd_vel geometry_msgs/Twist '{}'
也可以改变发送的topic信息,使机器人走出不同的轨迹。
三、实现分析
按照上面的仿真过程,我们详细分析每一步的代码实现。
1、TurtleBot机器人运行
机器人运行使用的是launch文件,首先打开fake_turtlebot.launch文件。
文件可以大概分为四个部分:
(1) 从指定的包中加载urdf文件
(2) 启动arbotix模拟器
(3) 启动状态发布节点
(4) tf坐标系配置
2、rviz配置文件
在打开rviz的时候需要加载一个.vcg的配置文件,主要对rviz中的插件选项进行默认的配置。这里打开的是sim_fuerte.vcg文件,由于文件比较长,这里只列举重点的部分。
Background\ ColorB=0.12549
Background\ ColorG=0.12549
Background\ ColorR=0.12549
Camera\ Config=158.108 0.814789 0.619682 -1.57034
Camera\ Type=rviz::FixedOrientationOrthoViewController
Fixed\ Frame=/odom
Grid.Alpha=0.5
Grid.Cell\ Size=0.5
Grid.ColorB=0.941176
Grid.ColorG=0.941176
Grid.ColorR=0.941176
Grid.Enabled=1
Grid.Line\ Style=0
Grid.Line\ Width=0.03
Grid.Normal\ Cell\ Count=0
Grid.OffsetX=0
Grid.OffsetY=0
Grid.OffsetZ=0
Grid.Plane=0
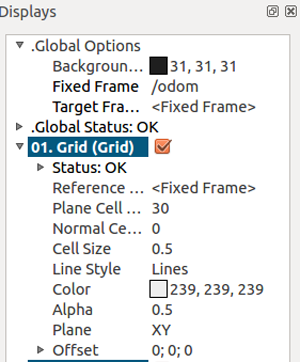
上面的代码是配置背景颜色和网格属性的,对应rviz中的选项如下图所示。
其中比较重要的一个选项是Camera的type,这个选项是控制开发者的观察角度的,书中用的是FixedOrientationOrthoViewController的方式,就是上面图中的俯视角度,无法看到机器人的三维全景,所以可以改为OrbitViewController方式,如下图所示:
3、发布topic
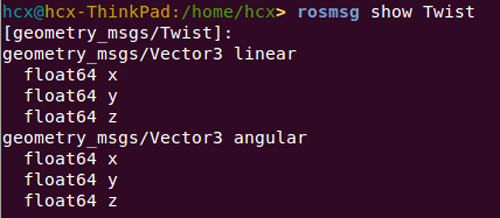
要让机器人动起来,还需要给他一些运动需要的信息,这些信息都是通过topic的方式发布的。
这里的topic就是速度命令,针对这个topic,我们需要发布速度的信息,在ROS中已经为我们写好了一些可用的数据结构,这里用的是Twist信息的数据结构。在终端中可以看到Twist的结构如下:
用下面的命令进行消息的发布,其中主要包括力的大小和方向。
Background\ ColorB=0.12549
Background\ ColorG=0.12549
Background\ ColorR=0.12549
Camera\ Config=158.108 0.814789 0.619682 -1.57034
Camera\ Type=rviz::FixedOrientationOrthoViewController
Fixed\ Frame=/odom
Grid.Alpha=0.5
Grid.Cell\ Size=0.5
Grid.ColorB=0.941176
Grid.ColorG=0.941176
Grid.ColorR=0.941176
Grid.Enabled=1
Grid.Line\ Style=0
Grid.Line\ Width=0.03
Grid.Normal\ Cell\ Count=0
Grid.OffsetX=0
Grid.OffsetY=0
Grid.OffsetZ=0
Grid.Plane=0
4、节点关系图(大图见附件)
来源:转自
古月居
的博客
附件大小
4、节点关系图
收藏
分享
评分
记录学习中的点点滴滴,让每一天过的更加有意义!
回复
引用
订阅
TOP
返回列表
嵌入式技术
MCU 单片机技术
无线技术
汽车电子
通信技术
数字电路
医疗电子
软件开发
电源与功率管理
DSP技术
电商论坛
Pine A64
资料下载
方案分享
FAQ
行业应用
消费电子
便携式设备
医疗电子
汽车电子
工业控制
热门技术
智能可穿戴
3D打印
智能家居
综合设计
示波器技术
存储器
电子制造
计算机和外设
软件开发
分立器件
传感器技术
无源元件
资料共享
PCB综合技术
综合技术交流
EDA
MCU 单片机技术
ST MCU
Freescale MCU
NXP MCU
新唐 MCU
MIPS
X86
ARM
PowerPC
DSP技术
嵌入式技术
FPGA/CPLD可编程逻辑
模拟电路
数字电路
富士通半导体FRAM 铁电存储器“免费样片”使用心得
电源与功率管理
LED技术
测试测量
通信技术
3G
无线技术
微波在线
综合交流区
职场驿站
活动专区
在线座谈交流区
紧缺人才培训课程交流区
意见和建议