1. 引言
Cypress在2013年推出了可编程片上系统PSoC(Programmable System on Chip)家族的最新产品PSoC4,采用ARM Cortex-M0作为处理核心。PSoC4完全继承了PSoC芯片家族本身的高度可编程的灵活性,并融合了Cortex-M0高性价比的处理器核架构,使得PSoC4系列产品成为一个具有高度可扩展性的处理器平台,在性价比、功耗等方面优势显着。更值得一提的是,PSoC4针对电机控制提供了完整和极具特色的片内资源,因此工程师在PSoC4上开发电机控制系统时将更加直观与快捷。
PSoC4产品系列目前推出的是CY8C4100和CY8C4200两个入门级产品系列。本文即以CY8C4200为例,介绍如何在PSoC4上开发有传感器的三相无刷直流电机控制系统。 2. PSoC4架构及与电机控制相关的片内简介
PSoC 4是基于ARM Cortex-M0 CPU(处理器)的可编程嵌入式系统控制器家族,为嵌入式应用提供了强大的可编程平台。它集合了可编程模拟资源、可编程内部互联、用户可编程数字逻辑、通用的固定功能外设计以及高性能的ARM Cortex-M0 CPU子系统。 如下图1所示的是PSoC4的系统框图。
图1SoC4的系统框图
PSoC4在开发环境方面与PSoC家族的上一代产品保持一致,仍然为PSoC Creator,延续了将片内资源抽象为模块化Component的开发方法,控制系统架构清晰具体,简单快捷。用户可以更多关注产品的功能开发,而较少的注意芯片的硬件结构细节。 3. 有传感器无刷直流电机控制原理及主要商用控制案例分析 ① 无刷直流电机控制原理
无刷直流(Brushless Direct Current, BLDC)电机正在汽车、家电、工业自动化、航空航天及医疗设备领域获得广泛的应用,并将继续逐步取代有刷电机。由于采用电子换相,BLDC电机具有更长的寿命和更小的运转噪音。此外,随着软磁材料技术的进一步提高和价格的不断下降,BLDC电机将更多的采用高性能的钕铁硼稀土材料制作永磁转子,其较高的磁能积和稳定的特性使BLDC电机拥有更好的机械特性和动态响应,更高的效率和转速范围。因此,在环境和性能要求比较苛刻的中高端应用中,BLDC电机将获得进一步的推广。
从电机结构原理上来说,BLDC电机定子和转子磁场具有相同的频率和转速,因此是同步电机的一种。定子绕组可绕制成单相、两相和三相,其中三相BLDC电机因输出功率大、转矩脉动小和效率高应用最广泛。本文的研究对象也将放在三相BLDC电机的控制系统上。
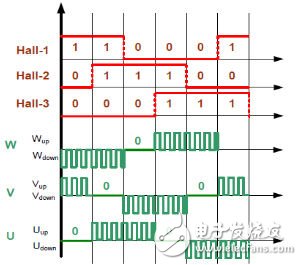
三相BLDC电机采用两相顺序通电模式产生旋转磁场,定子各相绕组的导通与否由转子位置唯一确定,以保证转子能够始终输出最大转矩。由于取消了自动换向的机械电刷,因此需要实时检测转子的空间位置,霍尔效应传感器因其较高的性价比和安装方便被广泛采用。对于两相导通的三相BLDC电机来说,每个电周期分成6个不同的通电区间,因此需要三个霍尔传感器来进行分区。图2为典型的霍尔传感器输出信号与相应的导通相之间的关系图,霍尔传感器的每一个变化都要求导通相的实时改变,电机即按照既定的逻辑连续顺序运行。
图2:霍尔传感器信号与相绕组导通关系图
② 无刷直流电机主要商用控制案例分析
目前各大主流半导体厂商均推出了各自的有传感器BLDC电机控制方案,技术类似,也比较成熟。概括说来,将三路霍尔传感器的输出接到MCU的输入引脚上,每一路电平的变化将会触发中断,在中断服务程序中根据图2的逻辑来查表改变相应的导通相,达到换向的目的。
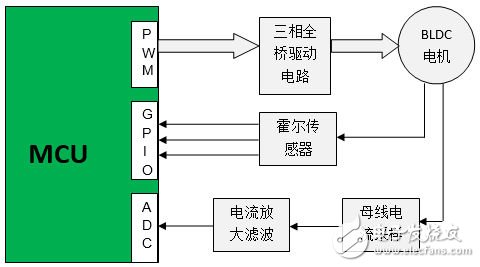
图3为市场上的主流商用方案示意图,通过简单的分析我们可以发现MCU通过中断服务程序来进行换相,在对电机电流的监控上,电流信号由外部采样及运放电路送入ADC后由软件程序来比较判断是否过流并关断PWM输出,保护电机及电路系统。






 SoC4的系统框图
SoC4的系统框图