首页
|
新闻
|
新品
|
文库
|
方案
|
视频
|
下载
|
商城
|
开发板
|
数据中心
|
座谈新版
|
培训
|
工具
|
博客
|
论坛
|
百科
|
GEC
|
活动
|
主题月
|
电子展
注册
登录
论坛
博客
搜索
帮助
导航
默认风格
uchome
discuz6
GreenM
»
工业控制
» 优化CAN节点位时序以适应数字隔离器传播延迟
返回列表
回复
发帖
发新话题
发布投票
发布悬赏
发布辩论
发布活动
发布视频
发布商品
优化CAN节点位时序以适应数字隔离器传播延迟
发短消息
加为好友
porereading
当前离线
UID
863084
帖子
7183
精华
0
积分
3592
阅读权限
90
在线时间
209 小时
注册时间
2011-11-30
最后登录
2019-8-28
论坛元老
UID
863084
1
#
打印
字体大小:
t
T
porereading
发表于 2014-10-19 10:05
|
只看该作者
优化CAN节点位时序以适应数字隔离器传播延迟
局域网
,
控制器
,
隔离器
,
汽车
,
工业
控制器局域网(CAN)由ISO 11898标准定义,广泛用于工业和汽车应用中。CAN协议(比如DeviceNet或CANOpen)依赖内置的错误检查和差分信号采样。电流隔离可进一步增强鲁棒性,能够抗高压瞬变,但会增加传播延迟。CAN节点经过优化配置,哪怕存在隔离时也具有最大数据速率和传送距离。
为什么传播延迟很重要
传播延迟会影响节点间的并发传输和仲裁。冲裁依赖于CAN信号发送;逻辑0表示“主动”(总线间的差分电压),逻辑1表示“被动”(全部输出为高阻抗),意味着主动位将覆盖被动位。发射时,所有节点监控总线;而发射被动位时则停止,从而允许另一个节点赢得仲裁(图1中的节点A)。
图1.两个节点间的仲裁
传播延迟不可过大,否则可能在其他节点传播主动状态之前会监控总线状态。对于图2中的节点A和节点B,往返时间很关键;该时间等于TPropAB加TPropBA,或者等于通过电缆和收发器延迟时间的两倍,包括隔离(如有)。相比光耦合器,数字隔离器可降低传播延迟,但系统允许的总传播延迟是固定的,因此加入隔离可能会降低最大电缆距离。
图2.带传播延迟的仲裁
传播延迟补偿
若要补偿隔离引起的传播延迟,可调节特定的CAN控制器参数。首先为CAN控制器时钟设置波特率预分频器(BRP)值,该值定义划分位时间的“时间量子”(TQ)。它们适用于3或4段,如图3所示;一个用来同步,另外数个用于传播延迟(PROP)以及相位段1和2(PS1和PS2)。PS2和总TQ表示采样点位置。
第一步:匹配时钟、预分频器和数据速率
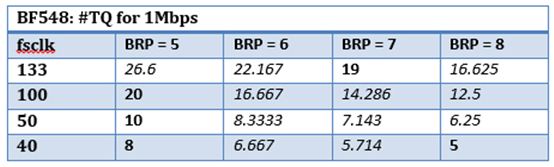
对于给定的数据速率来说,第一步是检查如何组合时钟和BRP,才能让TQ等于整数。1 Mbps示例如表1所示。该例采用ADI ADSP-BF548 Blackfin微处理器,内置CAN控制器。采用典型系统时钟(fsclk)值,TQ整数值以粗体显示(用于1 Mbps的有效时钟/BRP组合)。
表1.用于1 Mbps的时钟和BRP组合
第二步:位段配置
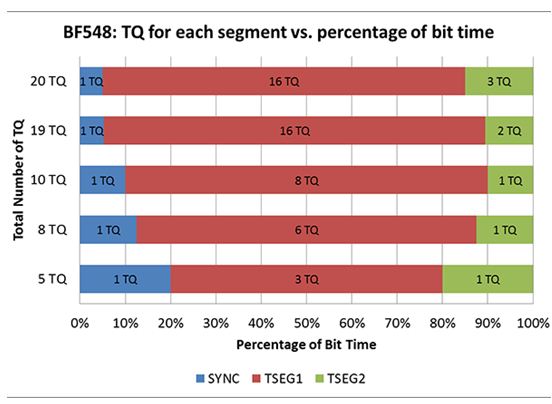
下一步是定义位段,并将采样点设得尽可能晚。对于表1中的每一个有效选项,SYNC段必须允许有一个TQ,并且TSEG2 (PS2)段必须适应CAN控制器处理时间(只要BRP大于4,BF548就要低于1 TQ)。TSEG1 (PROP + PS1)为16 TQ(最大值)。
图3. 1 Mbps时最大传播延迟的可能BF548位段
收藏
分享
评分
回复
引用
订阅
TOP
返回列表
消费电子
MCU 单片机技术
模拟电路
DSP技术
ARM
职场驿站
PowerPC
数字电路
电商论坛
Pine A64
资料下载
方案分享
FAQ
行业应用
消费电子
便携式设备
医疗电子
汽车电子
工业控制
热门技术
智能可穿戴
3D打印
智能家居
综合设计
示波器技术
存储器
电子制造
计算机和外设
软件开发
分立器件
传感器技术
无源元件
资料共享
PCB综合技术
综合技术交流
EDA
MCU 单片机技术
ST MCU
Freescale MCU
NXP MCU
新唐 MCU
MIPS
X86
ARM
PowerPC
DSP技术
嵌入式技术
FPGA/CPLD可编程逻辑
模拟电路
数字电路
富士通半导体FRAM 铁电存储器“免费样片”使用心得
电源与功率管理
LED技术
测试测量
通信技术
3G
无线技术
微波在线
综合交流区
职场驿站
活动专区
在线座谈交流区
紧缺人才培训课程交流区
意见和建议