基于STM32和FPGA的CAN总线运动控制器的设计(2)
|

- UID
- 1029342
- 性别
- 男
|
基于STM32和FPGA的CAN总线运动控制器的设计(2)

基于此本设计构造的速度、加速度、时间的对应函数如下:

S加减速在FPGA中的实现,如图4所示。在已知给定加速度A、加速度率K、初速度V0、以及进给速度V和总的pwm脉冲数的情况下,就可以得到S加减速曲线。

图5为本设计在Quartus II中的仿真波形,为了加快仿真的速度,特意在仿真而前对某些参数进行了修改。
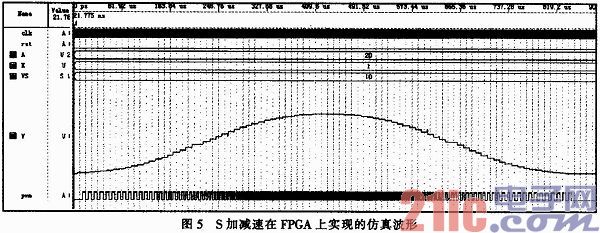
本系统的加减速模块的构造满足速度和加速度曲线的构造满足速度变化平稳,加速连续等条件,起始和终止速度与要求速度一致,加速度为0,加速度率K可以根据实际需要随时调整,通用性很好。
2.2.2 光电编码器模块
本系统采用的闭环控制,反馈信号的精度直接影响定位、测速,在此采用增量是编码器进行定位控制,增量式编码器主要是利用两个相差90度的方波信号A和B,和零位脉冲信号Z进行角位移和方向判断(如图6所示),从而达到了检测位置的目的,此外,我们将A或B信号四倍频,则计数脉冲的周期将减小到T/4,从而使角位移测量精度提高4倍。四倍频后的编码器信号,需经计数器计数后,才能转化为相对位置。由两个与非门、一个非门逻辑、D触发器组成传统的波形转换电路,通过它来将A相、B相脉冲转换成正向计数信号dz、反向计数信号df和方向(dir)信号,通过正反方向的数字信号加减完成最终的计数,最终的仿真数据如图7所示。


3 结束语
本课题研究是基于某品牌雕刻机控制系统设计进行的总结,旨在建立一种通用的运动控制器,通过该运动控制器以及系统其它部分的协同工作,整个控制系统实时性、可靠性好,满足了控制要求。通信非常稳定,相关算法还有待优化。 |
|
|
|
|
|



