基于PIC单片机及图像处理技术设计的智能台球机器人
|

- UID
- 863084
|

基于PIC单片机及图像处理技术设计的智能台球机器人
台球源于英国,它是一项在国际上广泛流行的高雅室内体育运动。随着各种运动的兴起发展,台球以其内涵高雅、放松身心的特点越来越受大家欢迎。依靠单片机技术的日益成熟,基于单片机的小型化高精度控制过程的广泛应用,色度学、先进光电成像技术、计算机技术和图像处理技术的飞速发展和电机驱动技术、传感器技术以及控制技术的不断发展,我们计划设计可以与人对打的台球智能机器人,使人们可以在即使一个人的情况之下也可以享受台球带来的娱乐、休闲。
我们这次设计的智能台球机器是以PIC单片机为核心的控制系统,结合了图像处理技术,PIC单片机控制电机系统,以及机械机构设计技术等方面的知识,利用了各种芯片来实现对台球系统的图像采集处理技术,同时,使用各种电机来控制机器人的运动和球杆的挥洒角度和力度系统。在系统结构上本设计的系统可以分为两个方面:图像处理系统、智能运动系统。智能运动系统又包含两个内容:运载系统和球杆系统。图像处理系统采集桌面台球的各种信息;智能运动系统通过各种电机实现机器人的运动和挥球运动。
该智能台球机器人由3部分构成:图像采集处理系统、智能运载系统和智能球杆系统。
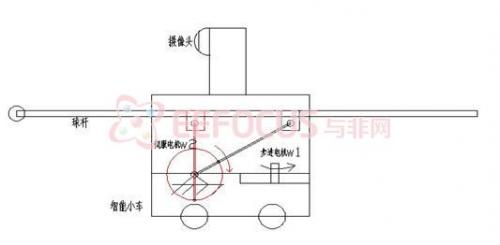
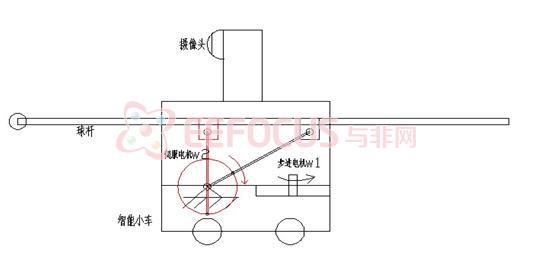
(一)、系统总体布局与原理框图
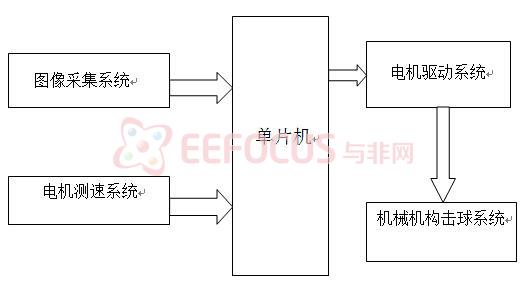
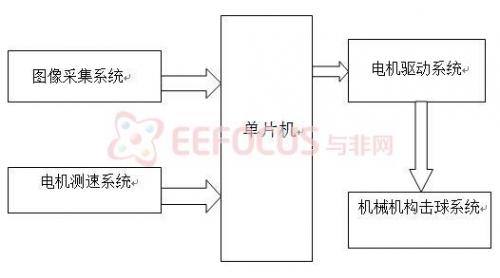
通过microchip公司生产的32位PIC单片机对CMOS采集过来的图像信息分析处理,然后向各个电机驱动电路发送相应的指令信息,控制电机的转向和转速,执行小车的运动,球杆瞄准,以及控制球杆击球的力度各项操作,完成一个智能台球机器人的自动捕捉和击球全过程。其原理框图如下所示:
(二)、系统的技术特点
该智能台球机器人结合了图像处理系统,PIC单片机控制电机系统,以及机械机构系统等方面的知识,是一个跨学科,多领域知识交叉的产品设计。智能台球机器人主要是由图像处理系统、电机驱动和测速系统,以及机械机构系统来协调完成智能击球过程的。
图像采集上对比CCD摄像头的特点CMOS摄像头不需要用视频采集卡就能输出数字信号,内带A/D转换,系统体积较小。
图像处理上利用CPLD和DSP协调的模块,大大减少需要传输的数据,加快了系统的传输速度,提高了上位机的工作效率。
运载系统主要利用伺服电机驱动,伺服电动机机械特性和调节特性均为线性, 动态响应快, 控制精度高, 可靠性高, 是自动控制系统中一种很好的执行元件。
球杆系统主要通过步进电机W1控制球杆的转角来对击球角度的瞄准,步进电机是数字控制电机,电机的转速、停止的位置取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,非超载状态下,根据上述线性关系,再加上步进电机只有周期性误差而无累积误差,因此步进电机适用于单片机控制。伺服电机W2控制球杆击球的速度,利用伺服电机高精度、高可靠性的性能以实现准确击球入袋的任务。 |
|
|
|
|
|