|

- UID
- 1029342
- 性别
- 男
|

l 引 言 在科研、生产和人们的日常生活中,模拟量的测量和控制是很常见的。为了对温度、压力、流量、速度、位移等物理量进行测量和控制,通过传感器把上述物理量转换成能模拟物理量的电信号,即模拟电信号,将模拟电信号经过处理并转换成计算机能识别的数字量,送入计算机,这就是数据采集。
数据采集的主要问题是采集速度和精度。采集速度主要与采样频率、A/D转换速度等因素有关,采集精度主要与A/D转换器的位数有关。高速数据采集系统的设计需要解决系统在速度、精度、数据存储等方面的矛盾。
2 数据采集系统的结构
本文介绍的数据采集系统采用Samsung公司的S3C2410微处理器。数据采集系统按照功能可分为以下几个部分:模拟信号调理电路,模数转换器,数据采集和存储,时钟电路和系统时序及逻辑电路,如图1所示。
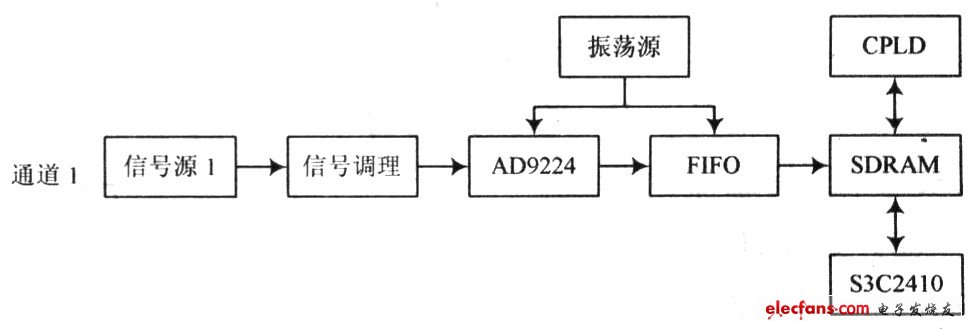
图1 数据采集系统结构图
3 数据采集系统关键技术分析
3.1 系统时钟电路设计
时钟信号的稳定性决定了采样系统的性能。相位噪声和相位抖动是反映时钟稳定性的的两个主要指标。其中相位噪声描述时钟信号的频谱纯度,相位抖动直接影响时钟的过零点。通常高速的AD采样系统采用三种时钟源:锁相环、晶振、模拟混频器。由于锁相环一旦失去基准频率,输出频率会立刻跳回振荡器本身的频率,此外当进行频率调整的时候,输出频率会产生抖动,频差越大,抖动会越大,不利与高速AD采样系统。模拟混频器速度慢,只适合在低频的条件下工作。因此,在高速电路的设计中,一般选择高频晶振作为时钟源。
在高速AD采样系统中,取样时钟的稳定性与信噪比的性能密切相关。任何时钟信号噪声及时钟信号相位抖动都会影响采样系统的精度,时钟信号相位抖动对模数转换信噪比(SNR)的影响,可通过公式计算:

其中:fs为采样时钟频率,N为模数转换器位数,△clk为时钟信号相位抖动量。
3.2 模数转换器的选择
ADC的选择除了要考虑数据输出电平,接口方式,控制时序,参考源,带宽等因素外,最重要的是根据设计需求计算动态指标:信噪比,采样率,满度范围等,从而可以得到ADC的位数、最高时钟频率、模拟输入范围等参数,既可选择所需要的ADC。本设计根据要求:采样频率20 MHz,实时采样20 Msps,转换位数12位,选择了美国AD公司的AD9224芯片。
3.3 模拟信号调理电路设计
被采样的信号经过模拟信号调理电路的低噪声放大,滤波等预处理后,进入输入通道。由于高速数据采集系统的输入信号多为高频信号,需要进行阻抗匹配和前置放大。因此可以选择高速低噪声信号前置放大器和信号变压器。
信号前置放大器的优势是放大系数可变,信号输入的动态范围大,还可以配置成有源滤波器,但是放大器的最高工作频率和工作带宽必须满足系统的需要,以避免信号失真。
信号变压器的性能指标要优于信号放大器,而且信号失真小。但是信号变压器的信号放大系数固定,输入信号的幅度受到限制。
3.4 硬双缓冲实现连续采集存储
在高速的数据采集过程中,要求数据存储和S3C2410读数据同时进行,在相关文献中提出了一种基于软件系统双缓冲模式的存储技术,但是经过分析发现其在解决连续存储和读数的同时也降低了微处理器的性能。在本设计中提出的基于硬件的双缓冲模式可以很好地解决这个矛盾,其工作原理如图2所示。
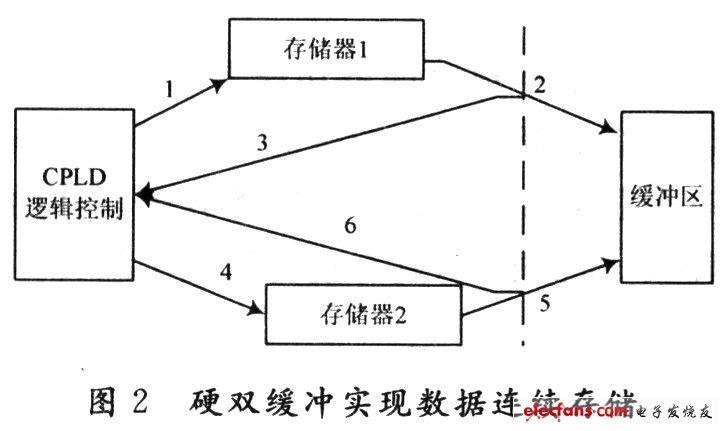
图中序号1~6代表工作流程,采集数据经CPLD控制首先由FIFO写入存储器1,当存储器1数据写满后,产生硬件中断信号,该信号有两个作用:通知微处理器系统数据已经准备好,由微处理器从存储器1取回数据放入缓冲区;通知CPLD控制逻辑关闭FIFO与存储器1之间的数据通道,同时开启FIFO与存储器2之间的数据通道,后续数据得以连续无间断的存入存储器1。此时,存储器1的数据正被微控制器读出,当存储器2数据就绪后,同样产生硬件中断信号。如此交替循环就可以实现采集数据长时间连续无断点存储。 |
|


