|

- UID
- 1023166
- 性别
- 男
- 来自
- 燕山大学
|

TOP2 解读两种机器视觉系统电路设计方案
机器人行走电路由驱动电路和直流电机的正反转电路两个单元构成。电路通过运用555构成的多谐振荡电路,同步计数器74LS196,七段译码器 74LS248,双JK触发器等基本单元电路,通过上述基本电路的级联组合,构成机器人行走电路。电路有效地实现机器人的行走与后退,通过调节阻值的大小而控制行走的时间,时间在数码显示管显示。利用三极管的导通和截止控制机器人的行走方向,从而满足设计电路的要求。
电路原理系统框图
方案一 电路图
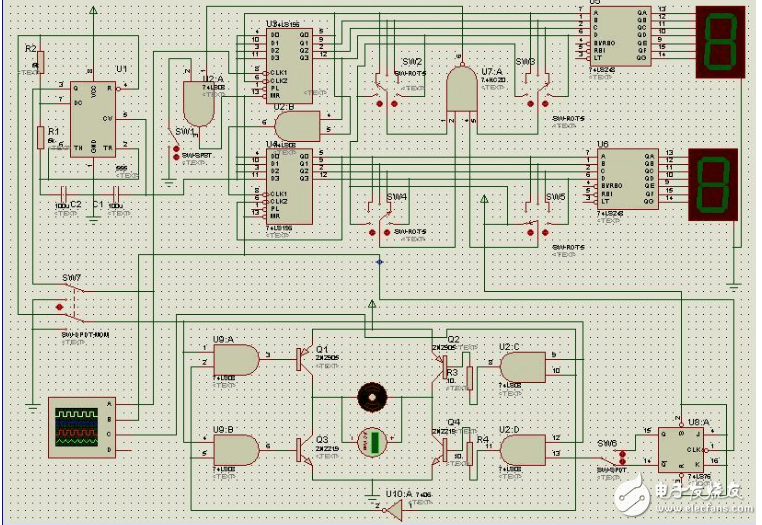
555构成多谐振荡电路产生方波信号,74LS196构成十进制计数器,74LS248控制七段共阴极数码管显示电路显示,计数器计数满产生触发信号触发双JK触发器,双JK触发器在触发信号的作用下输出发生高低电平跳变,触发器发生信号驱动直流电机两端压差发生正负跳变,直流电机正反转,实现机器人的前进和后退。电路中各个开关控制电机的转动及转动方向和时间。
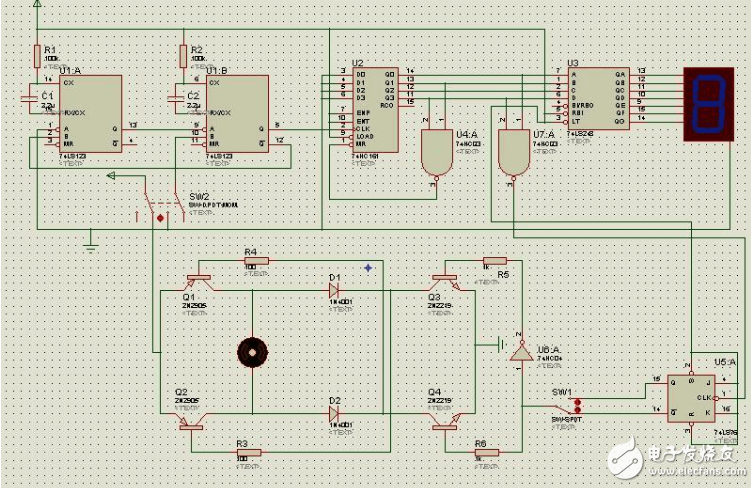
方案二 电路图
74LS123构成的定时器产生矩形波信号,用74HC161($0.1333)和与非门74HC03($0.1006)构成加十进制计数器,74LS248控制七段共阴极数码管显示电路显示,计数器计数满产生触发信号触发双JK触发器,双JK触发器在触发信号的作用下输出发生高低电平跳变,通过直流电机驱动电路改变电机两端电压方向,进而改变电机转向。电路中开关也可是电机制动,正反转。
机器人行走电路工作原理
555构成的多谐振荡电路产生方波信号接到74LS196时钟端触发74LS196加计数器计数,并通过74LS248驱动七段共阴极数码管显示计数。加计数器计数满十,通过74HC20($0.0957)与非门产生下降沿信号驱动双JK触发器使JK触发器构成的T‘触发器输出取非,从而驱动三极管构成的开关电路,通过各个三极管的导通与截止来实现直流电机两端的压差的正负跳变,驱动直流电动机的正反转,实现小车的前进与后退。其中,通过调节四个单刀五掷开关可以改变多谐电路输出方波周期,来调节小车的前进与后退的时间。多谐振荡电路产生方波信号接入到74196时钟端,驱动74196进行加计数。图中 74196接成了10进制加计数器,计数满十时通过74HC20($0.0957)与非门接入到清零端进行清零。由于计数到10时,便会立刻清零,不会在数码管上显示,所以此时信号很弱,不可以作为触发信号驱动JK触发器,JK触发器触发信号是计数到9时,通过74HC20($0.0957)输出下降沿信号触发。数码显示电路通过,74LS248驱动的七段共阴极数码管进行显示。
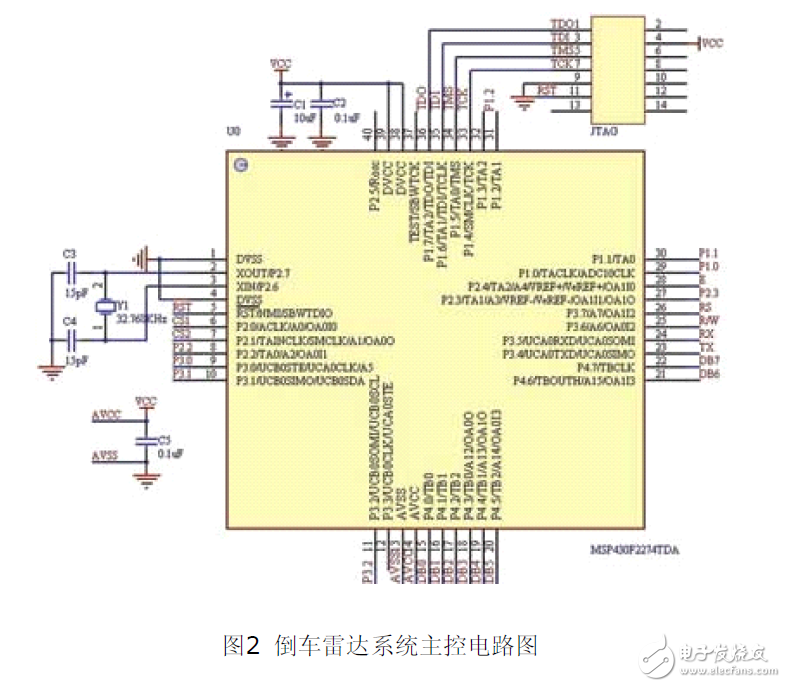
MSP430F2274($2.8125)单片机设计的倒车雷达系统电路
随着人们对汽车辅助驾驶系统智能化要求的提高和汽车电子系统的网络化发展,新型的倒车雷达应能够连续测距并显示障碍物距离,并具有通信功能,能够把数据发送到汽车总线上去。以往的倒车雷达设计使用的元器件较多,功能也较简单。本文介绍的基于新型高性能超低功耗单片机MSP430F2274($2.8125)的倒车雷达可以弥补以往产品的不足。
系统采用超声波测距原理。超声波测距仪器一般由发射器、接收器和信号处理器三部分组成。工作时,超声波发射器发出超声波脉冲,超声波接收器接收遇到障碍物反射回来的反射波,准确测量超声波从发射到遇到障碍物反射返回的时间,根据超声波的传播速度,可以计算出障碍物距离。作为一种非接触式的检测方式,超声波具有空气传播衰减小、反射能力和穿透性强的特点。超声波测距具有在近距离范围内有不受光线和雨雪雾的影响、结构简单、制作方便和成本低等优点。高性能的单片机结合超声波测距,可以实现功能强大、使用方便的倒车雷达。TI 公司的16位单片机MSP430F2274($2.8125)功耗极低,片上资源丰富,同时利用JTAG 接口技术,可以对片上闪存方便的编程,便于软件的升级,非常适合作为倒车雷达系统的微控制器。
 |
|



