|

- UID
- 1023166
- 性别
- 男
- 来自
- 燕山大学
|

TOP7 采用LED模拟调光的机器视觉辨认系统电路设计指南
具体电路设计
现有的开关电源控制芯片也有提供模拟调光功能,但是调光比都很小,一般在几十左右,是作为PWM 调光的一个补充,这个调光比和前述机器视觉辨认的要求差距较大。针对上述情况,本文重新对线性恒流电路进行了改进,在这部分电路前增加了可变降压电路, 用于匹配输入电压和LED 灯串电压,提高效率; 同时使用高精度的D /A 来控制电流输出,得到一个较高的模拟调光比。整个电路系统结构如图3,在AC /DC 电源的输出总线上可以挂载多于一路的可调恒流电路,通过ZigBee 模块进行输出电流控制,保证每一路输出的电流准确,可调。
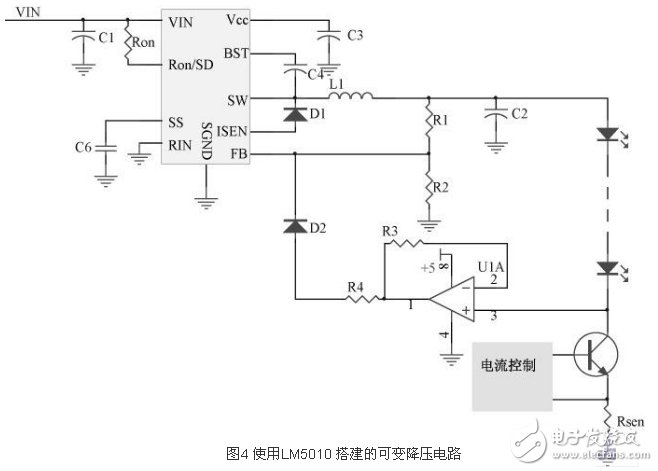
电路分析:可变降压电路的输入使用AC /DC 电源提供的48V 总线,这部分电路根据后接的LED 颗数多少和输出电流大小, 动态调节输出, 使其输出电压和LED 灯串电压的差额保持较小的水平,从而减小大电流下三极管的损耗。这里使用LM5010 降压芯片来搭建可变降压电路,LM5010是一个恒定导通时间的Buck 控制芯片。R1 和R2 组成电压反馈电路,将输出电压进行分压后输入至FB 脚上。每当FB 脚上电压低于2. 5V 时,芯片内部的开关会固定的导通一段时间,导通时间与输入电压和Ron有关, 之后开关会关断265ns 或直至FB 脚上电压下降到2. 5V 以下。电路通过(R1 + R2) /R2·VFB来设定最大输出电压。另一方面,为了降低在三极管的功率损耗,我们同时监测采集三极管和采样电阻的压降和, 并使用LM358 进行正向放大后通过D2 输入到FB 脚上。因此在三极管和采样电阻上的压降总和就不会大于Vdrop = ( VFB + VD2) × R3 / ( R3 + R4)。因此当LED灯串上的电压小于LM5010 的最大输出电压时,多余的电压就会由三极管和采样电阻承担,当这个电压经过放大后大于FB 脚的阈值时,LM5010 延长开关关断时间,使输出电压下降,因此最终的Vout =Vled + Vdrop。从而在LED 颗数比设计值少或者在对LED 进行调光时,前端输出的电压能够更合理的匹配灯串电压。
机械手视觉系统外围电路设计攻略
机械手的三块控制器的控制芯片都为2407DSP,虽然三块控制器实现的功能不同,但在硬件电路设计时按照DSP 管脚的功能,设计外围电路如下:
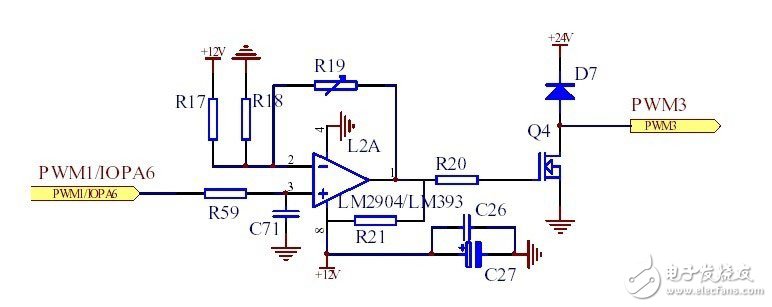
PWM 管脚:DSP 的每个事件管理器都有与比较单元相关的PWM 电路,能够产生六路带可编程死区和输出极性的PWM 输出,但是都是成对输出的,对于本控制器需要的独立的输出,每个事件管理器只有3 路,一个DSP 有两个事件管理器,可以独立的输出6 路PWM 波。液压控制器需要6 路PWM 波驱动电业比例阀,而伺服电机控制器需要4 路0-5V 的加速器信号调节电机转速,在设计电路时将这两种电路设计在一起,并制成印刷电路板,焊板时按每板的功能焊接即可,液压控制器需要输出PWM 波形,芯片用LM393 做比较器,此时电阻R19 和电容C71 不焊即可,但要有R21 上拉电阻,R17 和R18 将2 脚电压分在1.7V 左右比较合适。伺服控制器需要输出0-5V 电压芯片用LM2904 做运放用,焊电阻R19 和电容C17不用MOS 管、R21 和外接电源,也不用焊R17,直接将DSP 输出0-3.3V 电压放大到0-5V 输出。PWM/电压输出电路图见图:
 |
|



