|

- UID
- 1023166
- 性别
- 男
- 来自
- 燕山大学
|

TOP9 语音识别系统在家庭监护机器人应用电路
语音是人类最常用的交流方式,也是人类和计算机交流最渴望的方式。因此用语音同计算机交流也成为了最近研究的热点,计算机对语音的理解是计算机科学中的一个引人人胜的、富有挑战性的课题。我国语音识别研究工作开始的较晚,但近年来发展得很快,一直紧跟国际水平,国家也很重视,中科院自动化所研制的非特定人、连续语音听写系统和汉语语音人机对话系统,其字准确率或系统响应率可达90%以上。鉴于中国未来庞大的市场,国外也非常重视汉语语音识别的研究。
STM32嵌入式语音识别电路模块设计
介绍了一种以ARM为核心的嵌入式语音识别模块的设计与实现。模块的核心处理单元选用ST公司的基于ARM Cortex-M3内核的32位处理器STM32F103C8T6。本模块以对话管理单元为中心,通过以LD3320芯片为核心的硬件单元实现语音识别功能,采用嵌入式操作系统μC/OS-II来实现统一的任务调度和外围设备管理。经过大量的实验数据验证,本文设计的语音识别模块具有高实时性、高识别率、高稳定性的优点。
语音识别电路
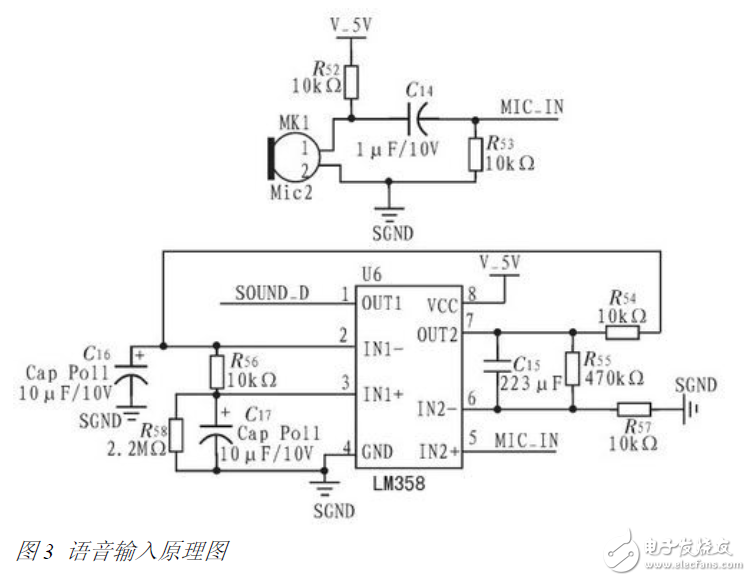
图3为语音识别部分原理图,参照了ICRoute发布的LD3320数据手册进行设计。LD3320的内部集成了快速稳定的优化算法,不需外接Fla-sh、RAM,不需要用户事先训练和录音而完成非特定人语音识别,识别准确率高。

图中,LD3320采用并行方式直接与STM32F103C8T6相接,均采用1kΩ电阻上拉,A0用于判断是数据段还是地址段;控制信号,复位信号以及中断返回信号INTB与STM32F103C8T6直接相连,采用10kΩ电阻上拉,辅助系统稳定工作;和STM32F103C8T6采用同一个外部8 MHz时钟;发光二极管D1、D2用于复位后的上电指示;MBS(引脚12)作为麦克风偏置,接了一个RC电路,保证能输出一个浮动电压给麦克风。
智能语音识别云台转动模块电路设计
云台转动电路
双自由度云台有4 个控制转动方向的端口, 分别是水平左转、水平右转、上升、下降, 需要24 V 的交流电来驱动, 而语音识别结果的二进制序列经过解码后由单片机AT89S52 的I/O 口输出, 其端口电平是0 ~5 V 的直流。为了能使单片机根据语音识别结果驱动云台转动,在AT89S52 和云台之间放置一个电流放大器件ULN2003 。ULN2003 是大电流、高耐压达林顿阵列, 包括7 个达林顿管, 在5 V 的工作电压下, 能够与TTL 和CMOS 电路直接相连, 这样就可以直接处理原来需要标准逻辑缓冲器来处理的数据。将控制云台转动方向的4 个端口D_Right 、D_Left 、D_Up 、D_Down 分别与继电器K1、K2、K3、K4 相连, 单片机AT89S52 根据解码后的语音识别结果控制继电器的断开和闭合, 从而控制云台转动的方向和角度。云台转动电路图如图所示。
 |
|



