2 硬件描述
2.1器件简介
TMS320VC5410数字信号处理器是美国TI公司推出的TMS320VC54x系列定点DSP中的一种,它具有144管脚的LQFP封装,采用3.3V的I/O电压和2.5V的核电压供电方式,具有3个独立的16位数据总线和1个程序总线的多总线并行结构,其低功耗和高速度适用于便携式系统的开发。由于本文涉及到DSP对FLASH的存储器地址操作;因此,在此对相关内容加以介绍。
DSP的存储空间包括程序空间和数据空间,它们均划分为64k X l6位的页面。其中DSP片内存储资源包括16k X l6位的可掩膜ROM以及可高速运行的4个2k X 16位的DARAM和7个8k X l6位的SARAM。DSP有两种工作模式:微处理器模式和微计算机模式,分别对应MP/MC=1和0。本系统中采用的是加电后从外扩的FLASH中启动,即采用微处理器模式,所以没有用到DSP内部ROM中固化的引导程序,而是采用早先写入FLASH中的自行设计的引导程序。
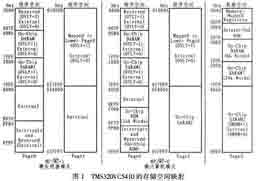
TMS320VC5410的存储空间映射如图1所示,它最大可支持128个存储页面,寻址空间为8Mb。在图1中,当MP/MC=1时,程序空间的第0和第1页面对应于图中最左边的两列,数据空间的第0页面对应于图中最右边的一列,其中的外部空间(External)即对应外扩的FLASH,只有这部分FLASH存储空间才可以被DSP访问到。由此可知,DSP对FLASH进行读写操作的前提是,FLASH在DSP存储空间中至少是可见的。