|

- UID
- 1029342
- 性别
- 男
|

3.1 传感器电路 传感器电路是获知迷宫信息的主要途径,其电路设计的好坏直接影响着机器人的工作。一般来说,传感器电路由控制电路、发射管、接收管和信号处理电路构成。阳光谱中含有红外成分,所以在迷宫机器人中要想方设法将红外光谱消除,才能保证迷宫机器人的正常运行。
本设计使用了5路传感器,分置于迷宫机器人的正前、偏左45°、左侧、偏右45°、右侧。每一路的打开与关闭由处理器控制,如图2所示。
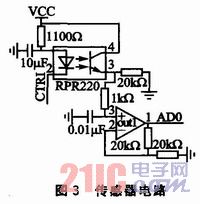
本设计中的传感器电路如图3所示。CTR1为传感器的开关控制口,CTR1置高时,发射管两端没有电压差,所以传感器不会对外发射红外信号;CTR1置低时,发射管和传感器均工作,对外发射红外光谱信号。当发射的红外光谱经迷宫墙壁发射反射回迷宫机器人时,接收管会产生感应电流。
3.2 传感器电路的使用
从前面的分析可以知道,传感器采集信号时存在着阳光干扰。在设计期间,我们也进行了相应的干扰实验。结果表明,阳光的干扰十分强烈,完全可以使得红外传感器失去作用。因此,在传感器电路的使用过程中必须考虑阳光对光电传感器的干扰,可从硬件和软件两方面去消除阳光的影响。
在本设计中,采用了软件消除误差的方法。首先,CTR1置高,也就是传感器发射管处于关闭状态。这时使用处理器的A/D采集模块对接收管的信号进行采集,作为基值AD1。然后,将CTR1置低,将发射管打开,再一次用处理器的A/D采集功能进行信号采集。这时采得的数据为AD2,是反射光谱和阳光红外谱的混合信号,而真正的A/D值应为AD=AD2-AD1。软件消除阳光红外光误差的流程如图4所示。
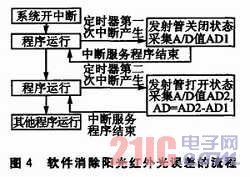
本设计采用MC9S12DG128处理器的PB0~PB4控制5个传感器的开断。实验表明,软件消除阳光红外光误差的方法效果较好。
3.3 实验结果
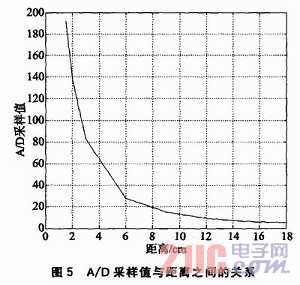
该实验使用RS232通信接口,将处理器采集获得的A/D数值实时传到上位机,然后改变车体与墙壁之间的距离,记录各个点的A/D数值,利用MATLAB绘制出A/D值与距离之间的关系图。
实验表明,该方法能够有效地在迷宫中进行距离的探测,最大探测距离达到20 cm,在1 cm处传感器饱和,而迷宫机器人的要求能够探测的最大距离为18 cm,饱和距离不能大于2 cm。显然,该电路完全满足使用要求。实验程序如下所示:
实验结果如图5所示,可见距离与A/D采样值成反比。
4 结论
本文设计了一款新型迷宫机器人,其中光电传感器的设计部分采用RPR220实现。实验表明,本设计的探测距离完全满足迷宫机器人的使用要求。 |
|


