520503 当前离线
论坛元老
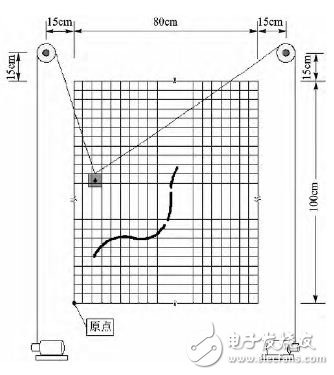
图1 悬挂系统的模型
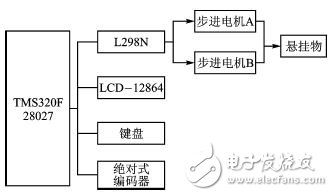
图2 悬挂系统控制框图
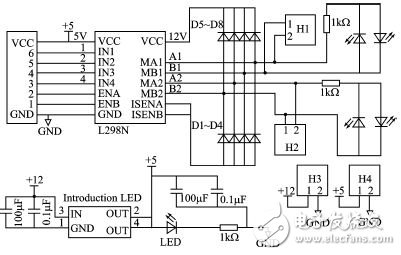
图3 L298N模块电路原理图
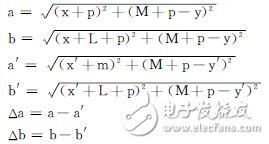
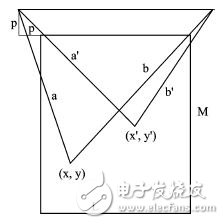
图4 坐标示意图
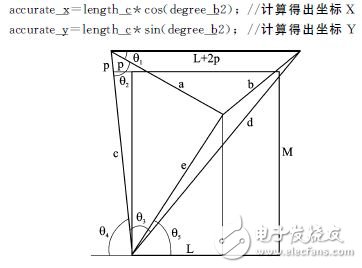
如图5所示,存在以下的角度和边长关系:
图5 坐标示意图
订阅 TOP