|

- UID
- 1029342
- 性别
- 男
|
GPIO驱动是嵌入式系统中最简单的驱动,然而有多少电子类高材生在它身上栽了跟头?
干货 | 最简单IO驱动的智慧
从单片机到ARM7、ARM9、Cortex-A8,从uC/OS到WinCE、Linux,GPIO驱动都是最简单、最易编写的驱动。但看似简单、毫无技术含量的驱动,其是否完整?是否规范?是否安全?
典型案例
本节将选取两例典型案例,从反、正两个角度进行对比。
反方案例
以某一源码中XXX驱动为例,截取XXX_IOControl部分的代码,如程序清单1所示;请留意代码突出显示部分。
程序清单1

从反方案例,实现GPIO电平状态的读或写的功能仅需要几行代码,非常简单。
正方案例
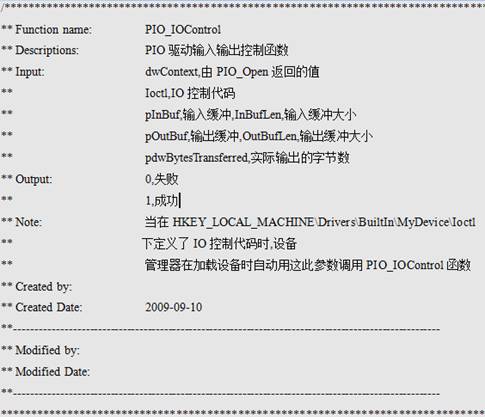
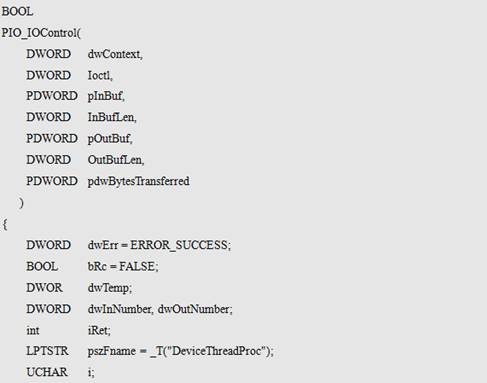
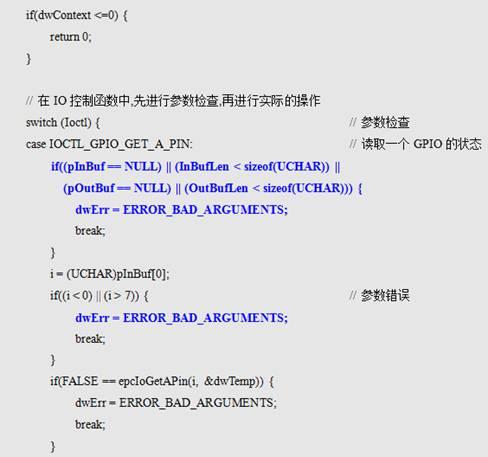
如程序清单2所示,代码截取自ZLG某核心板GPIO驱动,请留意代码中突出显示部分。
程序清单2


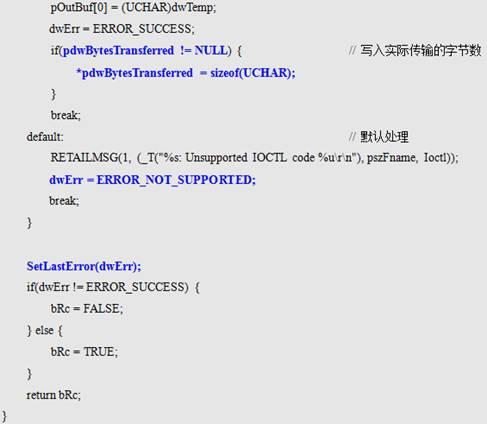
从正方案例,实现GPIO电平状态的读或写的功能却花费了2倍的代码工作量,差异为何如此大?
案例点评
一、指针使用
在反方案例中,函数传递进来的指针参数未经判断而直接使用,这种情况下若为空指针或野指针,则程序极可能出现异常甚至崩溃!
反方案例在读取操作后,使用“*pBytesReturned = 2;”返回实际读取的字节数,但是,该指针依然未经判断而直接使用!
而正反案例则在每一项参数使用前均对参数范围、有效性进行判断,从根本上避免了参数异常情况的发生!
二、错误提示
在反方案例中,XXX_IOControl只是返回TRUE或FALSE,返回FALSE时应用层无从获取或获知是什么原因造成了“FALSE”!
对比正方案例,在参数判断时即开始添加错误提示,在return之前,调用SetLastError函数,应用层则可以通过GetLastError获取错误原因,允许用户更快速、准确的定位错误点。
三、注释
反方案例函数体内外几乎无注释;
而正方案例,无论函数体内的关键位置还是函数体外,均做必要、详细的注释说明,为程序的后期维护带来极大的便利!
包括最简单的GPIO在内,驱动实现功能非常容易,但驱动的完整性与可靠性却蕴藏着软件工程的大智慧。 |
|