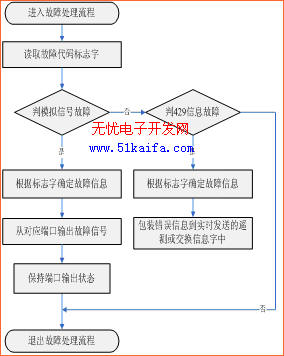
a) 在中断服务流程中,合理安排CPU查询缓冲区状态的时间点,待CPU将接收到的上一帧数据和待发送的下一帧数据处理完毕后,再查询缓冲区的数据个数,接满后由CPU读走进行处理,从而实现了接收数据与处理数据的并行操作;
b) 数据传输操作主要靠FPGA逻辑程序在后台进行,CPU在前台完成数据处理;
c) 在429参数打包、解包处理过程时,对频繁使用的二进制加权处理方法进行改进,不再调用C标准算法库math.h中的pow( )函数,取而代之自定义的移位运算函数,pow( )是通用的C整型/浮点型运算库函数,F240调用它势必会占用大量的机器周期,而移位操作在实现二进制加权功能的同时,运算速度却能成倍提高。