首页
|
新闻
|
新品
|
文库
|
方案
|
视频
|
下载
|
商城
|
开发板
|
数据中心
|
座谈新版
|
培训
|
工具
|
博客
|
论坛
|
百科
|
GEC
|
活动
|
主题月
|
电子展
注册
登录
论坛
博客
搜索
帮助
导航
默认风格
uchome
discuz6
GreenM
»
模拟电路
» 以旋转变压器为测量元件的7M CNC伺服系统
返回列表
回复
发帖
发新话题
发布投票
发布悬赏
发布辩论
发布活动
发布视频
发布商品
以旋转变压器为测量元件的7M CNC伺服系统
发短消息
加为好友
yuchengze
当前离线
UID
1062083
帖子
5837
精华
0
积分
2921
阅读权限
70
在线时间
222 小时
注册时间
2016-6-30
最后登录
2018-9-9
金牌会员
UID
1062083
性别
男
1
#
打印
字体大小:
t
T
yuchengze
发表于 2017-2-24 15:28
|
只看该作者
以旋转变压器为测量元件的7M CNC伺服系统
计算机
,
变压器
,
工作台
,
进给量
,
测量
.软件部分 与7360系统的
伺服控制
一样,7M系统也是采用实时中断实现
伺服控制
的。与7360系统不同的是,7M系统的差补计算部分每8ms进行一次,计算出8ms内工作台的进给量ΔDci,而位置控制部分则每4ms计算一次,将计算结果作为一个4ms的进给指令,经过计算机接口输出。位置控制部分的计算过程为:
(1)跟随误差的计算。设上一个4ms开始时工作台的实际位置为DFi-1,从位置检测组件获得的上一个4ms内工作台实际位置增量为ΔDFi,那么本次4ms周期开始时工作台的实际位置为
(5—14)
设上一个4 ms结束时指令位置为Dci-1,那么,本次4 ms的指令位置为
(5—15)
因此,本周期的
伺服系统
跟随误差,或称位置偏差为
(5—16)
(2) 进给速度指令的计算。与7360系统相同,为了控制的需要,要将跟随误差转化为进给速度指令,即根据E值的大小,按下式求出进给速度指令vDA值,即
(5—17)
此外,由于位置控制系统特别是速度控制装置的零点有误差,在给定的速度指令电压为零时,速度控制装置的输出电压不为零,使
直流伺服
电机(执行元件)仍以慢速旋转。因此,需在软件中补加一个零点偏移补偿量ΔS,使补偿后的直流伺服电机停止旋转。所以,实际的速度指令值的计算应为
(5—18)
2.硬件部分
(1) 位置控制输出组件。位置控制输出组件线路如图5-55所示,速度指令寄存器寄存从工业处理机来的速度指令值vDA,其0~12二进制位存放速度值,第14位是符号位,最大指令值为 +8191,最小指令值为 -8191。
数模转换
器由可预置数的减法计数器组成,定时向计数器置入速度指令值,然后以一定的速率减到零,可将数字量的速度指令值转换为调宽脉冲MP,脉冲周期等于置数周期,脉冲宽度τ与vDA成正比。在7M系统中,为了减少电路误差对精度的影响,将
数模
转换器的减法计数器分成粗计数器(9~12位)和精计数器(0~8位)两部分。两个计数器的置数周期T均为128μs,粗计数器的计数时钟为125 kHz,最大计数值为15;精计数器的计数时钟为4 kHz,最大计数值为511。
调宽脉冲是不带符号的,为此,需将MP变换成可表示正负值的调宽脉冲NP。此外,为了输出电平稳定精确,还需将脉冲变换成标准幅值,完成这一功能的电 路是模拟开关。关于模拟开关电路参见鉴幅式伺服系统一节的检波器线路。
滤波放大器由
运算放大器
T1和T2等组成,如图5-55所示。T1是放大倍数为1的高
输入阻抗
电路,T2将粗精调宽脉冲NPC和NPF按16倍的比例混合,并且滤掉脉冲成分,将直流成分放大到所需的电压VP。
图5-55 位置控制输出组件线路图
按图5-55的滤波放大电路,可写出VP的计算公式:
(5—19)
当VNPC和VNPF均为2.5 V(相当于vDA=0)时,VP应为零,将各电阻值代入上式,可求得标准电压VRD为2.023 8 V。那么,VP就可表示为
(5—20)
根据选用的执行元件不同,VP还要转换成驱动这些执行元件所需的形式,即 还要经驱动放大环节,如伺服阀放大器、可控硅驱动线路等。
(2) 位置检测组件。位置检测组件由检波器、电压频率转换器和sin/cos发生器、实际位置计数器等电路组成,其方
框图
如图5-56所示。
由sin/cos发生器产生的8 kHz的正弦
余弦
电压被送到旋转
变压器
的定子绕组(或感应同步器的滑尺),在旋转
变压器
的转子绕组(或感应同步器的定尺)上感应出电压信号VC。VC作为输入信号送到检测装置,先经过10 kHz低通滤波器滤去信号的高次谐波成分和干扰信号。滤波器的输出被送到检波器,把交流信号变换为直流信号VE。再经过6 kHz低通滤波器滤去8 kHz的脉动成分,输出平滑的直流电压VF,VF送到电压频率转换电路,转换为频率与VF成正比的脉冲CVFC, VF还被送到符号检测电路,检出VF的符号SIGN。CVFC和SIGN经同步电路后,被送到sin/cos发生器和实际位置计数器,以控制旋转
变压器
激磁信号中电气角α的变化,并根据α角产生脉宽调制的正弦余弦电压,同时,使计数器计数,计出的数字表示一段时间内坐标位置的移动量DFi。
电压频率转换电路和低通滤波器、检波器线路参考鉴幅式伺服系统。
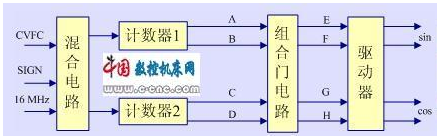
图5-57 脉宽调制式的sin/cos发生器的方框图
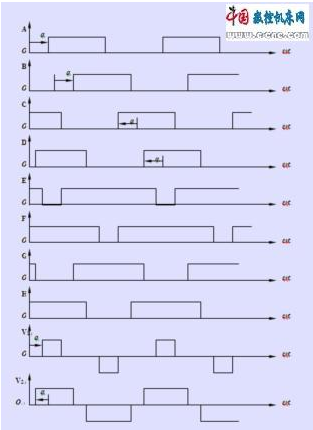
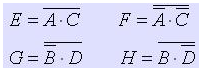
脉宽调制式的sin/cos发生器的方框图如图5-57所示。它由混合电路、两套分频比为1000的计数器和正弦余弦波形组合门电路以及驱动器等组成 。混合电路的作用是根据脉冲CVFC及其符号SIGN ,使计数器1多计脉冲CVFC所表示的数和使计数器2少计CVFC所表示的数;或使计数器1少计CVFC所表示的数和使计数器2多计CVFC所表示的数 。在混合电路中有一只J-K触发器作为计数器,所以sin/cos发生器总分频比为2000 。当计数器的计数脉冲是16 MHz时,计数器输出频率为8 KHz的方波,相当于2π rad的脉冲数为2 000,每个脉冲为π/1 000 rad。脉宽调制式的正弦余弦波形可用波形合成的方法产生。如果计数器的输出波形A滞后α角,计数器1的另一端输出B比A滞后90°;计数器2的输出C导前α角,计数器2的另一个输出D比C滞后90°。再把A,B,C,D四个波形加到组合门电路,合成E,F,G,H的工作波形,其逻辑关系为
此组合电压经驱动电路加到旋转
变压器
(或感应同步器)的激励绕组两端,激励绕组上实际承受的电压是两端电压的偏差值,即
此V1和V2就是所要求的余弦和正弦调宽脉冲的波形,各工作波形如图5—58所示。图中α为脉冲宽度的相角,可在0~360°范围内变化。用傅里叶级数分析,可得出sin和cos函数的基本成分为
(5—21)
(5—22)
式中为ω角频率,ω=2πf,此处,f是正弦和余弦波形的频率,本系统中采用8kHz。
图5-58 sin/cos发生器工作波形
收藏
分享
评分
回复
引用
订阅
TOP
返回列表
电商论坛
Pine A64
资料下载
方案分享
FAQ
行业应用
消费电子
便携式设备
医疗电子
汽车电子
工业控制
热门技术
智能可穿戴
3D打印
智能家居
综合设计
示波器技术
存储器
电子制造
计算机和外设
软件开发
分立器件
传感器技术
无源元件
资料共享
PCB综合技术
综合技术交流
EDA
MCU 单片机技术
ST MCU
Freescale MCU
NXP MCU
新唐 MCU
MIPS
X86
ARM
PowerPC
DSP技术
嵌入式技术
FPGA/CPLD可编程逻辑
模拟电路
数字电路
富士通半导体FRAM 铁电存储器“免费样片”使用心得
电源与功率管理
LED技术
测试测量
通信技术
3G
无线技术
微波在线
综合交流区
职场驿站
活动专区
在线座谈交流区
紧缺人才培训课程交流区
意见和建议






 (5—14)
(5—14) (5—15)
(5—15) (5—16)
(5—16) (5—17)
(5—17) (5—18)
(5—18)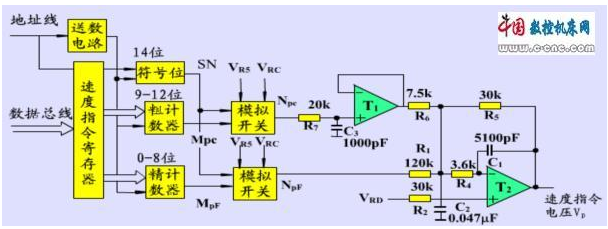
 (5—19)
(5—19) (5—20)
(5—20)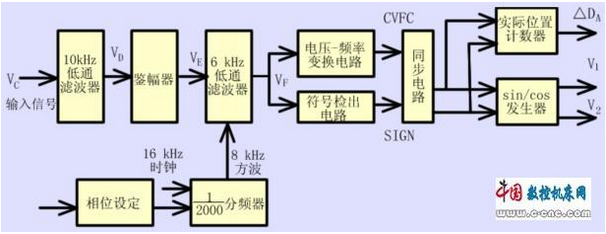

 (5—21)
(5—21) (5—22)
(5—22)